



")
")






")
")















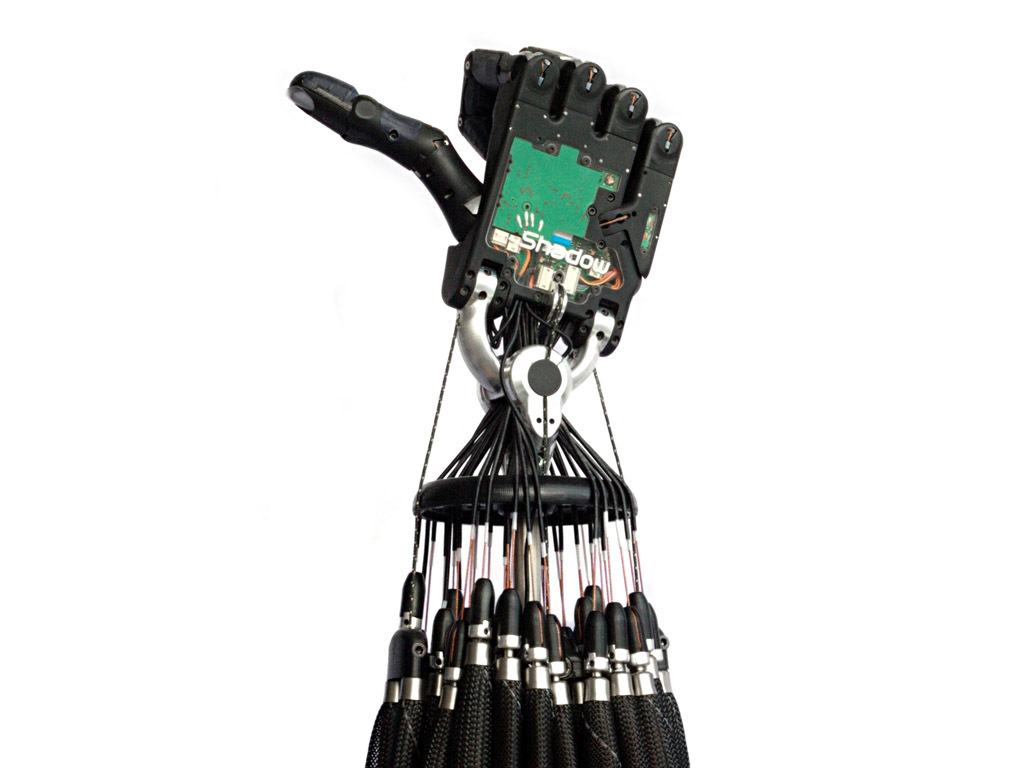









Робот Shadow Robot Company Shadow Hand
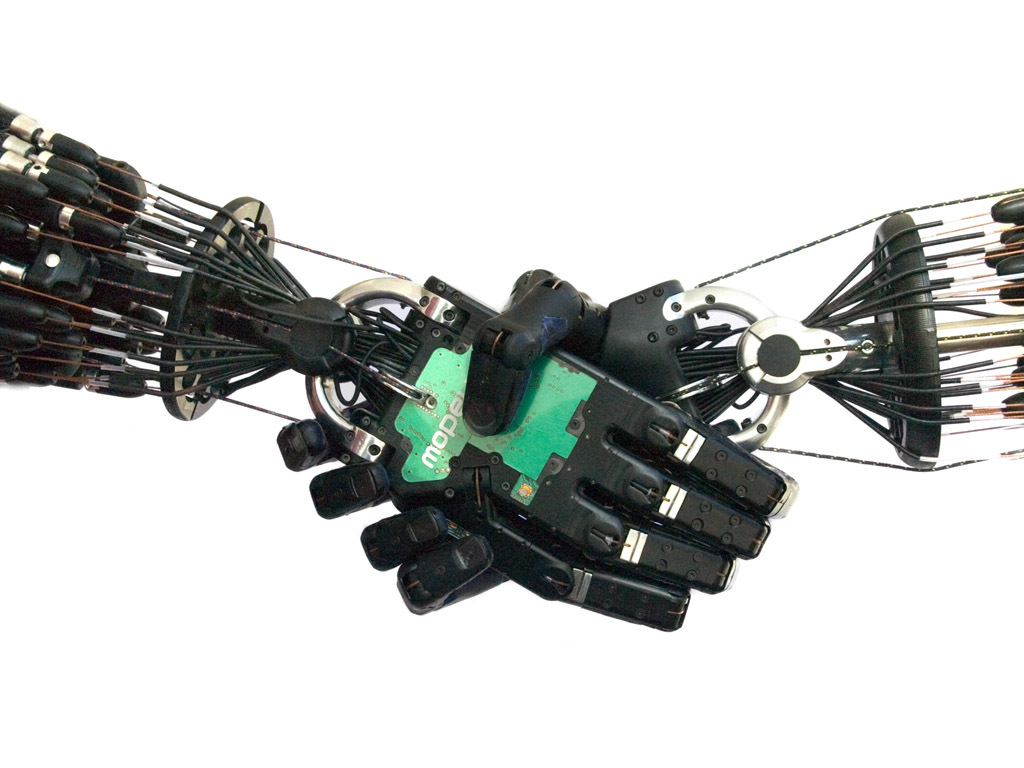
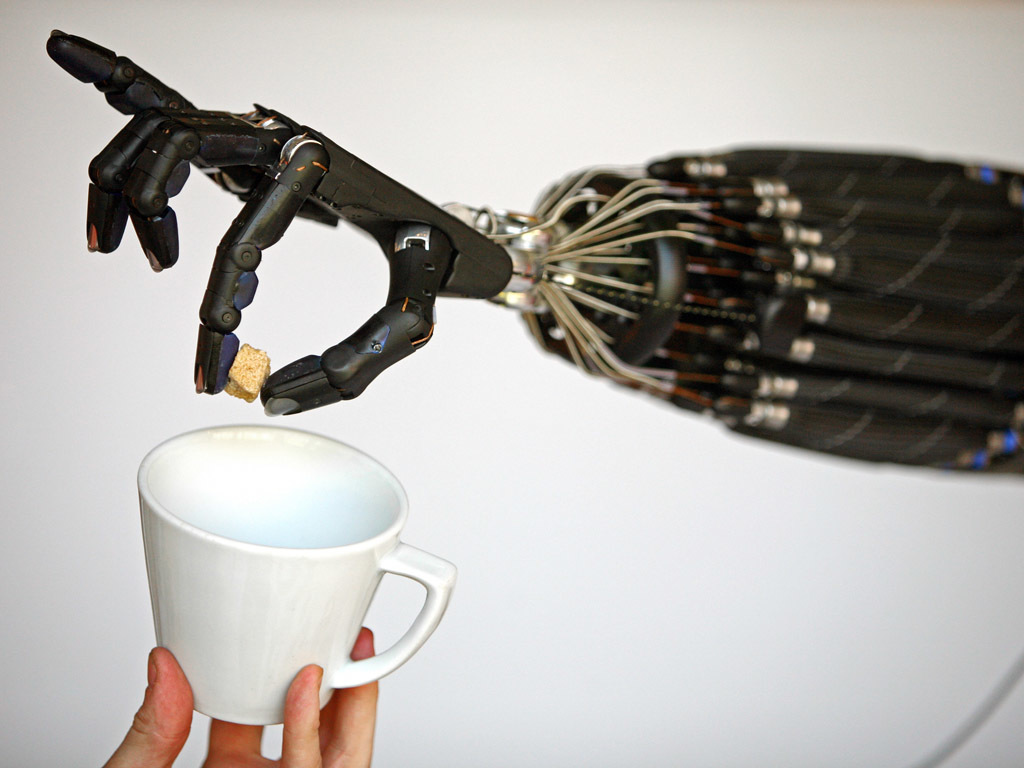
Shadow Hand - одна из самых продвинутых рук роботов в мире. Он разработан, чтобы максимально воспроизвести функциональность, размеры и диапазон движений человеческой руки.
Для приложений дистанционного управления и телеприсутствия Shadow Hand можно комбинировать с тактильными датчиками и управлять через тактильную перчатку для обратной связи касания, что позволяет пользователям выполнять задачи манипуляции в удаленном месте, не находясь там физически. Антропоморфный дизайн имитирует размер, форму и степени свободы человеческой руки. Оснащен датчиком положения и тактильным датчиком в руке.
Описание
Основатель Shadow Ричард Гринхилл говорит, что компания началась в 1987 году как группа любителей, которые собирались на чердаке его лондонского дома. Его жена готовила большую кастрюлю спагетти, и группа работала всю ночь, питаясь обильным количеством чая и кофе.
Первая рука робота Тени была сделана из обрезков кленового дерева, извлеченных из мусорного контейнера местного производителя кухонной мебели.
После того, как Ричард Гринхилл и его коллеги разместили фотографию своего прототипа руки робота на веб-сайте, университет связался с ними и попросил цену покупки. Они дали номер, и университет сказал «да».
После испытания тактильного телеробота, основанного на руке Тени, генеральный директор Amazon Джефф Безос назвал его «до странности естественным» в эксплуатации.
Видео
Характеристики
| Тип робота | Промышленность, Дистанционное присутствие, Исследования |
| Бренд | Shadow Robot Company |
| Страна производитель | Соединенное Королевство |
| Мощность | Блок питания 48 В, 2,5 А |
| Программное обеспечение | Заказное программное обеспечение на базе операционной системы роботов (ROS). Программное обеспечение на главном ПК обеспечивает калибровку и масштабирование сенсора, сопоставление имен сенсоров с оборудованием и легкий доступ ко всем возможностям робота из Python и C ++. |
| Год разработки | 2004 г. |
| Высота | 44,8 см |
| Длина | 13,5 см |
| Масса | 4,3 кг |
| Датчики | Шестиосевой гироскоп и акселерометр, датчики угла шарнира, датчики силы-момента, тактильные датчики, датчики тока и температуры. |
| Приводы | 20 двигателей Maxon, использующих ШИМ. Каждый моторный узел реализует ПИД-регулятор, который может быть настроен на управление усилием на сухожилиях на конце мотора или управление положением на суставах. |
| Вычисление | Многоядерный ноутбук под управлением Ubuntu с сетевыми портами, совместимыми с EtherCAT. |
| Степени свободы (DOF) | 24 (всего 24 степеней свободы. 20 активированных степеней свободы. Палец: 3 степени свободы x 4; большой палец: 5 степеней свободы; ладонь: 1 глубина резкости; запястье: 2 степени свободы) |
| Материалы | Комбинация металлов и пластмасс, включая алюминий, латунь, ацетил, поликарбонат и полиуретановую пленку. |
| Стоимость | £ 50000-90000 (в зависимости от конфигурации) |
