



")
")






")
")
















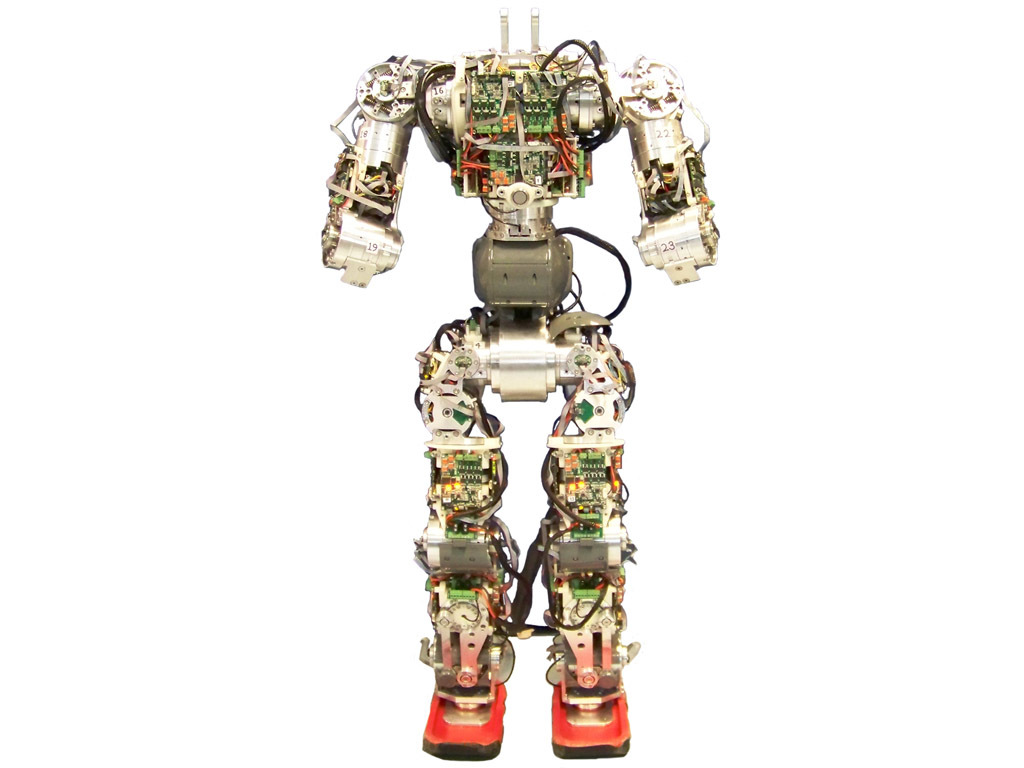








Робот COMAN
КОМАН - робот-гуманоид, созданный для безопасного взаимодействия с людьми. В отличие от большинства гуманоидов, у него нет жестких суставов: его руки и ноги могут ощущать приложенные силы и двигаться податливым образом.
Оснащен контролем крутящего момента и положения всех шарниров. Способен стабилизировать себя на неровной поверхности или при толкании.
Описание
- КОМАН расшифровывается как «совместимый человекоид».
- Робот недавно встретился и пожал руку премьер-министру Италии Энрико Летта.
- Его корпус доступен в красном, темно-зеленом, голубом и темно-синем цветах.
COMAN произошел от двух других гуманоидных проектов: iCub (2007) и cCub (2010). Первоначальный iCub был традиционным гуманоидом с управляемым положением, а cCub был послушным двуногим. Для COMAN целью было создание робота, который мог бы безопасно взаимодействовать с объектами и людьми даже в случае столкновения. Для этого в каждый из двигателей были встроены датчики крутящего момента, обеспечивающие активное управление крутящим моментом. Пассивные упругие элементы серии также были встроены в 14 ключевых исполнительных механизмов для обеспечения гибридного активного / пассивного управления. COMAN является частью финансируемого Европейским союзом проекта AMARSi по развитию манипуляции всем телом, передвижения и безопасного взаимодействия человека и робота.
Видео
Характеристики
| Тип робота | Гуманоиды, Исследования |
| Бренд | Italian Institute of Technology (IIT) |
| Страна производитель | Италия |
| Мощность | Литий-ионно-полимерный аккумулятор 29 В, 2 часа работы |
| Программное обеспечение | Linux с фреймворком реального времени Xenomai |
| Год разработки | 2012 |
| Высота | 95 см |
| Длина | 20,5 см |
| Масса | 33 кг |
| Скорость | 2,5 км/ч |
| Датчики | Определение положения и крутящего момента на каждом шарнире. Шестиосевое определение силы / крутящего момента на лодыжках и запястьях. Инерциальный измерительный блок (ИДУ) в туловище. |
| Приводы | Более 30 бесщеточных двигателей постоянного тока с регулируемым крутящим моментом, в том числе 14 эластичных элементов нестандартной серии для повышенной податливости. |
| Вычисление | Два бортовых встроенных компьютера PC / 104 и нестандартный объединенный контроллер DSP. |
| Степени свободы (DOF) | 31 (шея: 2 степени свободы; рука: 7 степеней свободы x 2; талия: 3 степени свободы; нога: 6 степеней свободы x 2) |
| Материалы | Каркасная конструкция из алюминия. Корпус из АБС-пластика. Титановый торс. |
| Ширина | 41 см |
