



")
")
")



")
")












Робот ACM-R5H














Робот ACM-R5H
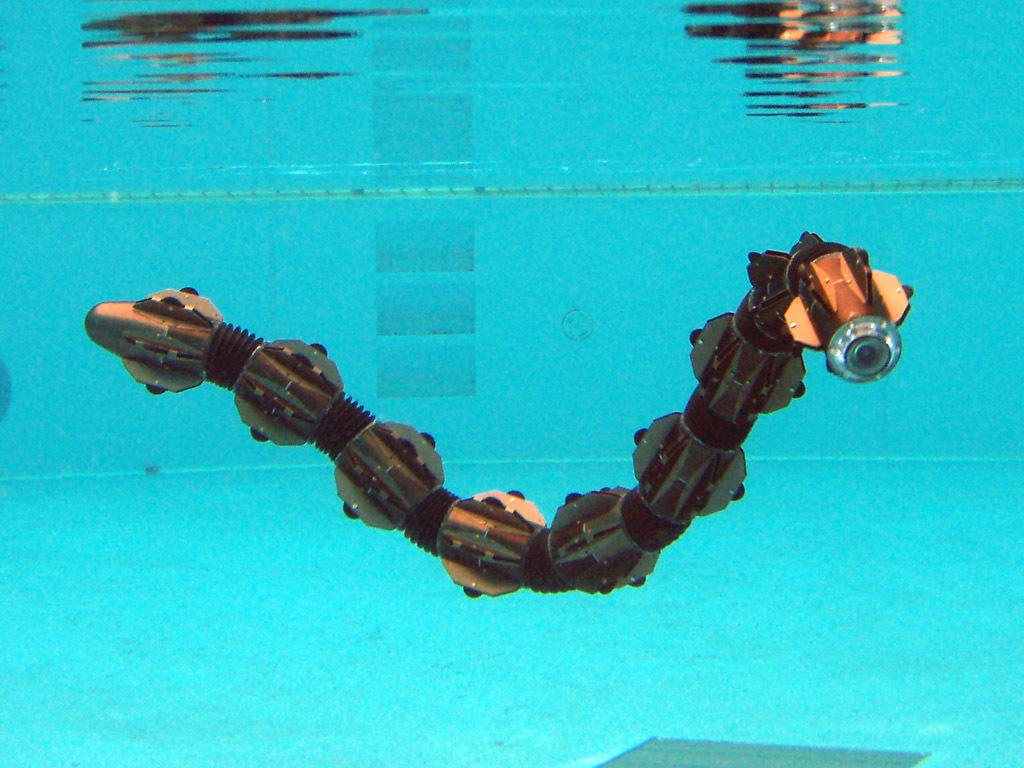
ACM-R5H - робот-змея, который может отправиться туда, куда не может пойти ни один человек. Он предназначен для проведения подводных обследований и поисково-спасательных операций в опасных условиях. Амфибия, устойчивая к пыли и жидкостям, модульная конструкция.
Описание
- Этот робот-змея может выполнять движения, недоступные даже настоящим змеям, например, непрерывно кататься по всему телу.
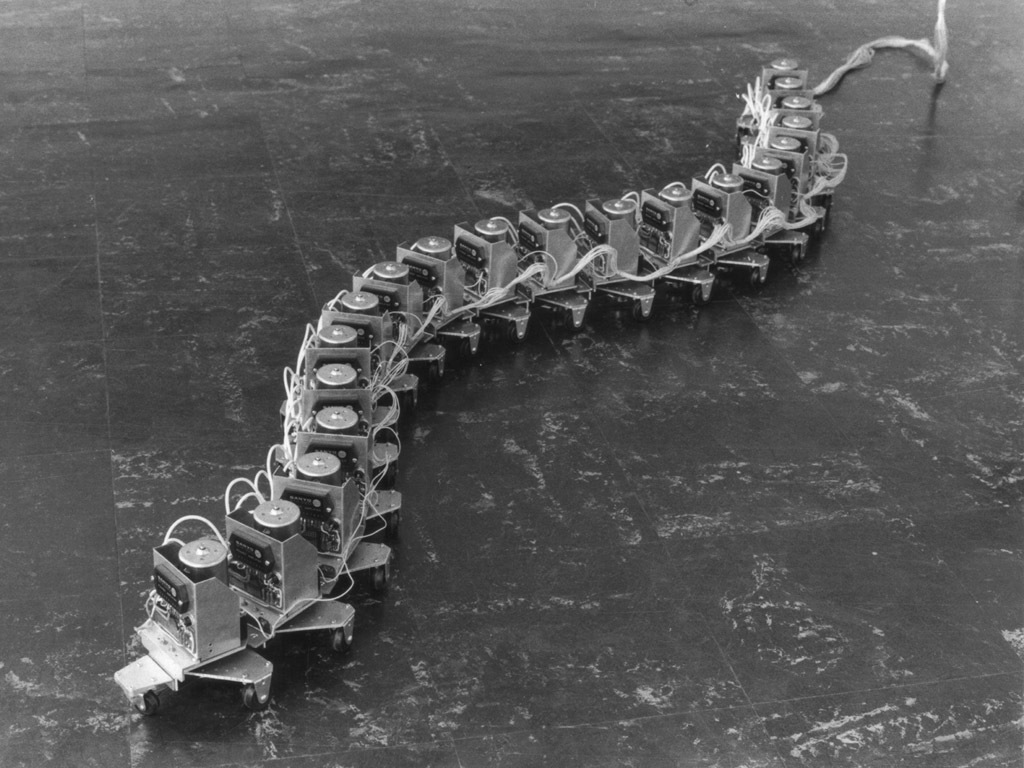
- Технология основана на новаторской работе профессора Токийского технологического института Шигео Хиросе в области дизайна роботов-змей.
Первый прототип был построен в 2005 году в лаборатории Шигео Хиросе Токийского технологического института. Версия продукта была разработана в 2010 году компанией HiBot, дочерней компанией Tokyo Tech. Текущая версия коммерчески доступна. Цена зависит от количества сегментов и желаемых датчиков.
Видео
Характеристики
| Тип робота | Реагирование на Катастрофу, Промышленное, Подводное |
| Бренд | Токийский технологический институт и HiBot |
| Страна производитель | Япония |
| Мощность | В каждом сегменте есть аккумулятор и зарядное устройство. |
| Программное обеспечение | Индивидуальная встроенная система |
| Год разработки | 2010 г. |
| Высота | 12 см |
| Длина | 170 см |
| Масса | 7 кг (9-сегментная змея) |
| Скорость | 1,44 км/ч |
| Датчики | ПЗС-камеры в головном и хвостовом сегментах. Могут быть добавлены другие датчики. |
| Приводы | 2 серводвигателя постоянного тока на каждом сегменте. |
| Вычисление | Микроконтроллер HiBot Mini2Axes SH2 (на каждом сегменте). Головной сегмент с процессором ARM Cortex M4 с Wi-Fi. |
| Материалы | Детали из алюминия, резины и пластика. |
Вопросы и отзывы
Робот ACM-R5H
Добрый день!
У меня имеются следующие вопросы по ACM-R5H :
- использование робота в трубопроводе от 400 до 1000мм
- возможно ли использование на участках до 100м с большим количеством поворотов?
- возможно ли использование, если в трубопроводе находятся отложения различного рода, в зависимости от использования (например, коксовые отложения, по дну трубопровода)?
- есть ли вариант магнитных роликов для перемещения по вертикали?
У меня имеются следующие вопросы по ACM-R5H :
- использование робота в трубопроводе от 400 до 1000мм
- возможно ли использование на участках до 100м с большим количеством поворотов?
- возможно ли использование, если в трубопроводе находятся отложения различного рода, в зависимости от использования (например, коксовые отложения, по дну трубопровода)?
- есть ли вариант магнитных роликов для перемещения по вертикали?
Вячеслав
— 21. 10. 2021
Нашли дешевле?
