



")
")
")



")
")












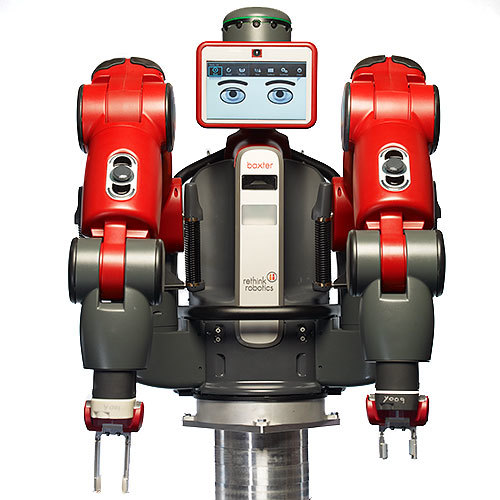













Робот Rethink Robotics Baxter
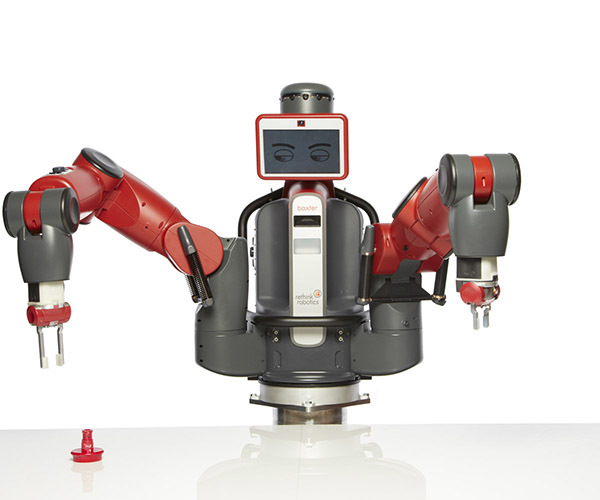
Baxter - универсальный производственный робот. Его камеры и датчики силы позволяют ему адаптироваться к изменениям в окружающей среде, и пользователь может запрограммировать новую задачу, просто перемещая руки.
Описание
- Бакстер не говорит, но кивает головой ЖК-дисплея, показывая, что понял новую команду.
- Изначально компания хотела назвать своего робота Cooper (для сотрудничества), но столкнулась с трудностями при использовании товарного знака и выбрала вместо этого Baxter.
- Роботы Rethink названы в честь древнеанглийских профессий, ведь Бакстер - пекарь.
- Rethink выпустила комплект для разработки программного обеспечения, позволяющий пользователям изменять возможности и поведение Baxter.
- Оснащен системами активной и пассивной безопасности и удобным интерфейсом управления. Способен управлять движениями на основе зрения и ощущения силы.
Родни Брукс, соучредитель iRobot и бывший директор Лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института, в 2008 году основал компанию Rethink Robotics, которая тогда называлась Heartland Robotics. Его целью было разработать доступного промышленного робота, который мог бы автоматизировать повторяющиеся задачи на малых и средних предприятиях. -размерные производители, работающие вместе с людьми и помогающие им с задачами, а не занимающимися их работой. Компания работала в условиях полной секретности до конца 2012 года, когда она сменила название на Rethink Robotics и представила своего первого робота под названием Baxter. Rethink привлекла 62 миллиона долларов венчурного финансирования.
Видео
Характеристики
| Тип робота | Промышленные |
| Бренд | Rethink Robotics |
| Страна производитель | США |
| Мощность | Стандартный источник питания 110 В |
| Программное обеспечение | ОС Linux и специальное программное обеспечение управления с интеграцией ROS (Robot Operating System). |
| Год разработки | 2012 г. |
| Высота | 94 см (от талии до головы) |
| Длина | 37 см |
| Масса | 75 кг (не включая пьедестал) |
| Датчики | Пять камер (одна в голове, две в груди и по одной в каждом предплечье). Измерение силы на основе последовательных упругих приводов. Голова с эхолотом для обнаружения приближающихся людей. |
| Приводы | Серийные эластичные приводы с бесщеточными двигателями постоянного тока, металлическими и пластиковыми редукторами и нестандартным пружинным элементом. |
| Вычисление | Главный компьютер на базе Intel внутри туловища. Платы контроллера мотора на базе ARM внутри рук. |
| Степени свободы (DOF) | 16 (рука: 7 степеней свободы x 2; голова: 2 степени свободы) |
| Материалы | Литой алюминий, термопласты, детали из порошкового металла. |
| Стоимость | 22 000 долл. США |
