



")
")
")



")
")













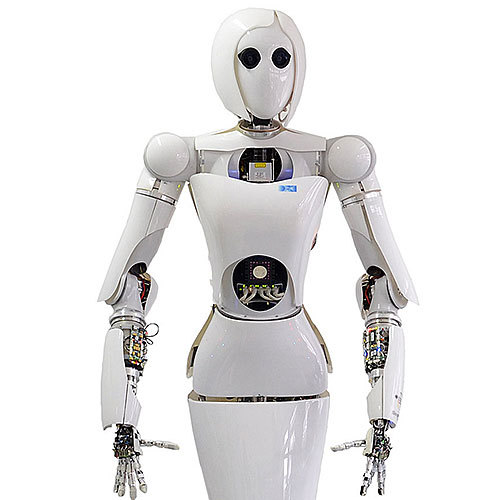
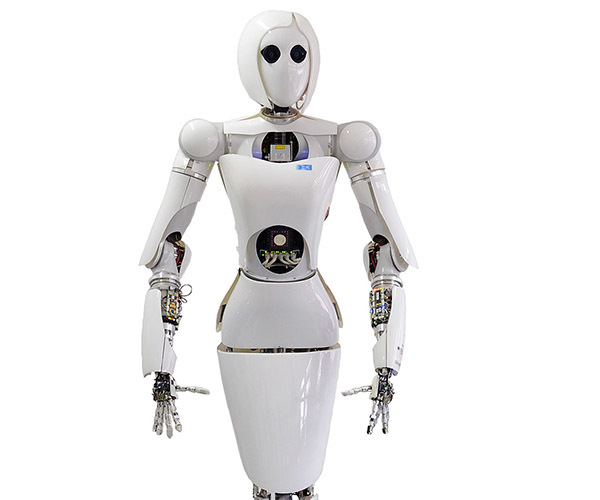












Робот AILA
AILA - это робот-гуманоид, используемый исследователями для изучения мобильных манипуляций, восприятия роботов и искусственного интеллекта. Она учится выполнять задачи в среде людей и тренируется, чтобы стать космонавтом.
Оборудован шестиколесной мобильной базой. Возможность создавать карты и перемещаться автономно. Легкая рука, способная поднимать до 8 кг (17,6 фунта).
Описание
- AILA расшифровывается как Artificial Intelligence Lightweight Android.
- На три бортовых компьютера приходится около 70 процентов потребляемой энергии AILA.
- Мобильная база AILA на самом деле является автономным роботом.
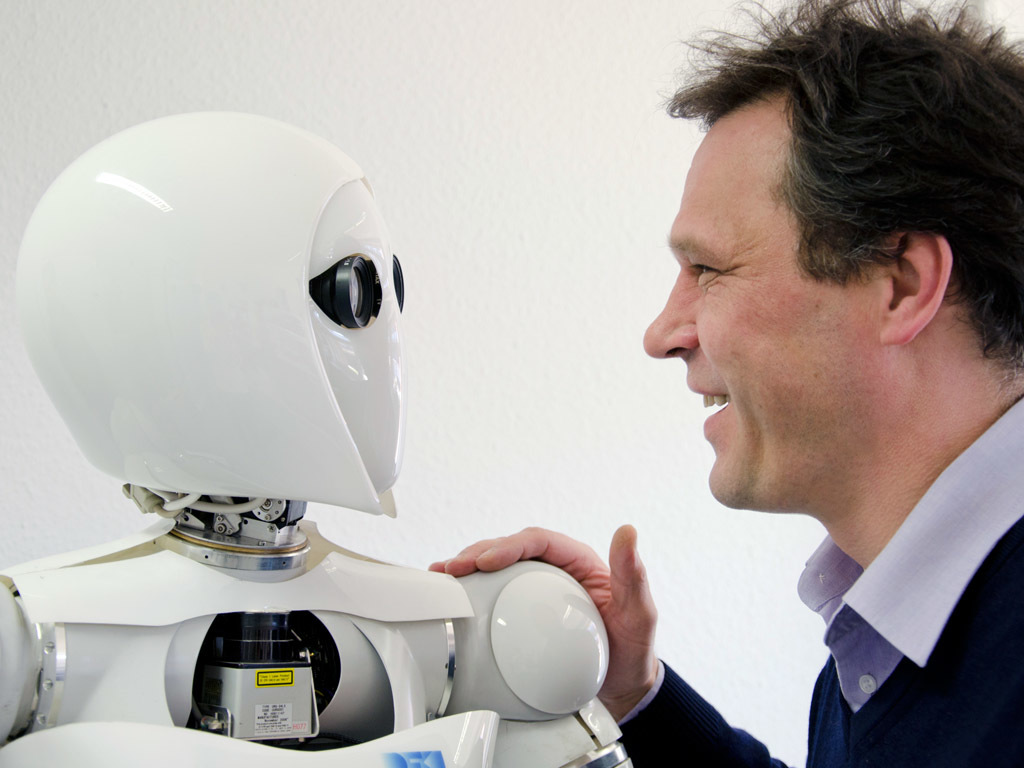
Франк Киршнер начал создавать роботов на ножках в качестве инструмента для изучения машинного обучения и искусственного интеллекта в 1990-х годах, сначала в качестве исследователя в Боннском университете, Германия, а затем в Северо-Восточном университете в США. Сейчас Кирхнер возглавляет Центр инноваций в робототехнике Немецкого исследовательского центра искусственного интеллекта (DFKI), он создал гуманоида AILA для исследования управления, познания и обучения робототехники в реальных условиях. Цель состоит в том, чтобы использовать AILA для исследования систем с возрастающей сложностью как с точки зрения механизмов, так и с точки зрения алгоритмов. Среди обновлений, запланированных для AILA, есть то, чего у нее все еще нет: пара ног.
Видео
Характеристики
| Тип робота | Гуманоиды, Исследования |
| Бренд | DFKI Robotics Innovation Center |
| Страна производитель | Германия |
| Мощность | Никель-металлогидридная батарея 48 В, 4,5 Ач, 0,5 часа работы. |
| Программное обеспечение | ОС Linux и специальное программное обеспечение на основе ROS (уровень связи), ROCK (средний уровень) и Roby (высокий уровень). |
| Год разработки | 2010 |
| Высота | 173 см |
| Длина | 115 см |
| Масса | 97 кг |
| Скорость | 8 км/ч |
| Приводы | 14 бесщеточных двигателей постоянного тока для рук, 4 линейных двигателя постоянного тока для туловища, 12 двигателей на колесах, 2 сервопривода для головы. |
| Вычисление | Три встроенных ПК с двухъядерными процессорами для управления движением, навигации и обработки изображений. Каждая рука соединена с настраиваемыми контроллерами на базе FPGA. |
| Степени свободы (DOF) | 50 (голова: 2 степени свободы; рука: 7 степеней свободы x 2; рука: 9 активных степеней свободы x 2; торс: 4 степени свободы; мобильная база: 12 степеней свободы) |
| Материалы | Углеродное волокно, алюминий, сталь. |
| Ширина | 75 см |
