



")
")
")



")
")



























Робот Armar
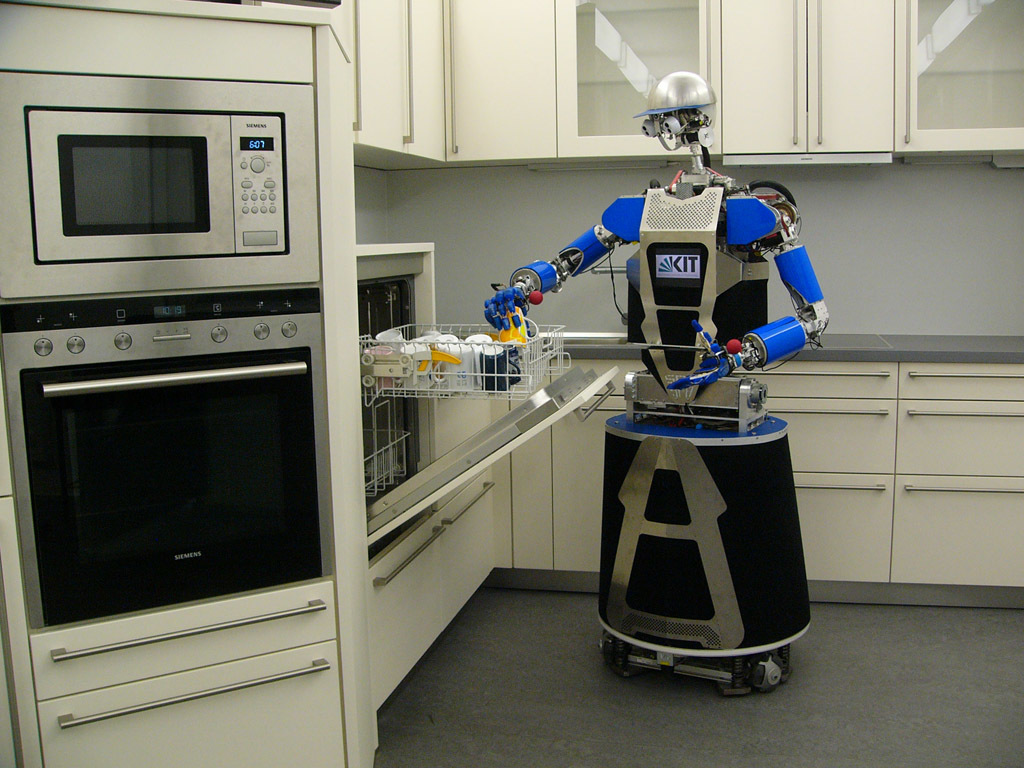
Armar - робот, созданный для того, чтобы быть помощником в промышленных условиях. Его гуманоидная форма позволяет ему использовать человеческие инструменты, такие как дрели и молотки. Ранние версии были домашними помощниками, которые могли мыть столы и загружать посудомоечную машину.
Бимануальное и мобильное манипулирование. Учимся на человеческих наблюдениях. Соответствующее управление и физическое взаимодействие человека и робота. Диалог на естественном языке.
Описание
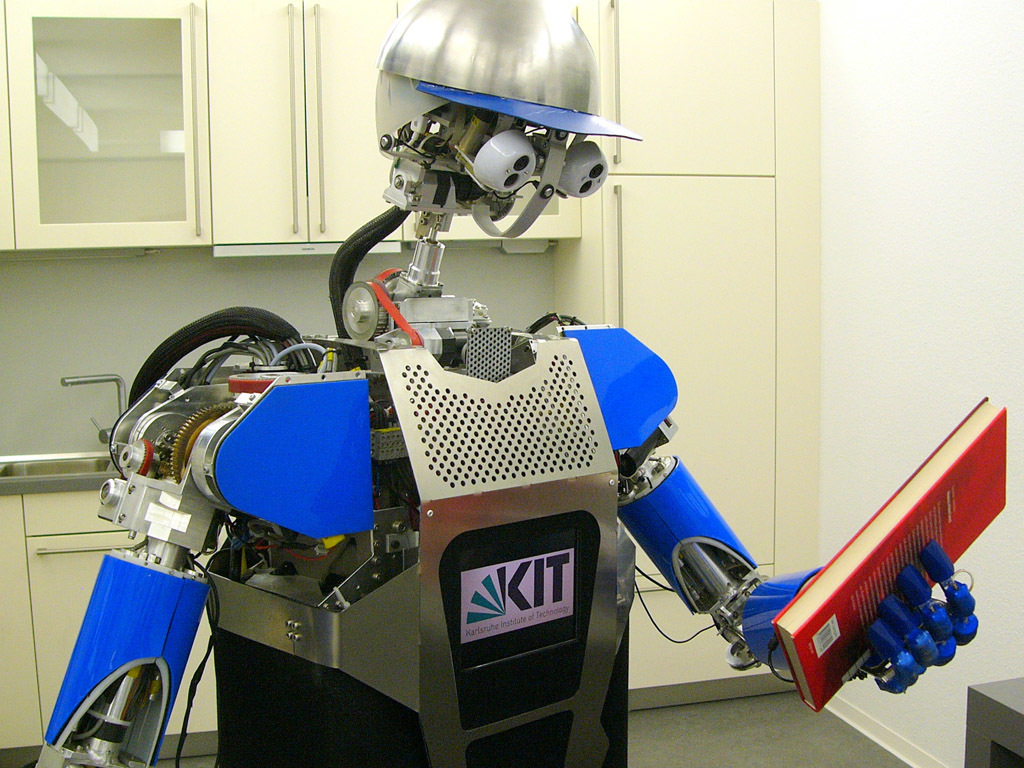
- ARMAR расшифровывается как «антропоморфный многорукий робот».
- В 2010 году Армар встретился с канцлером Германии Ангелой Меркель и вручил ей розу.
- Армар способен изучать новые навыки, наблюдая за человеком и подражая ему.
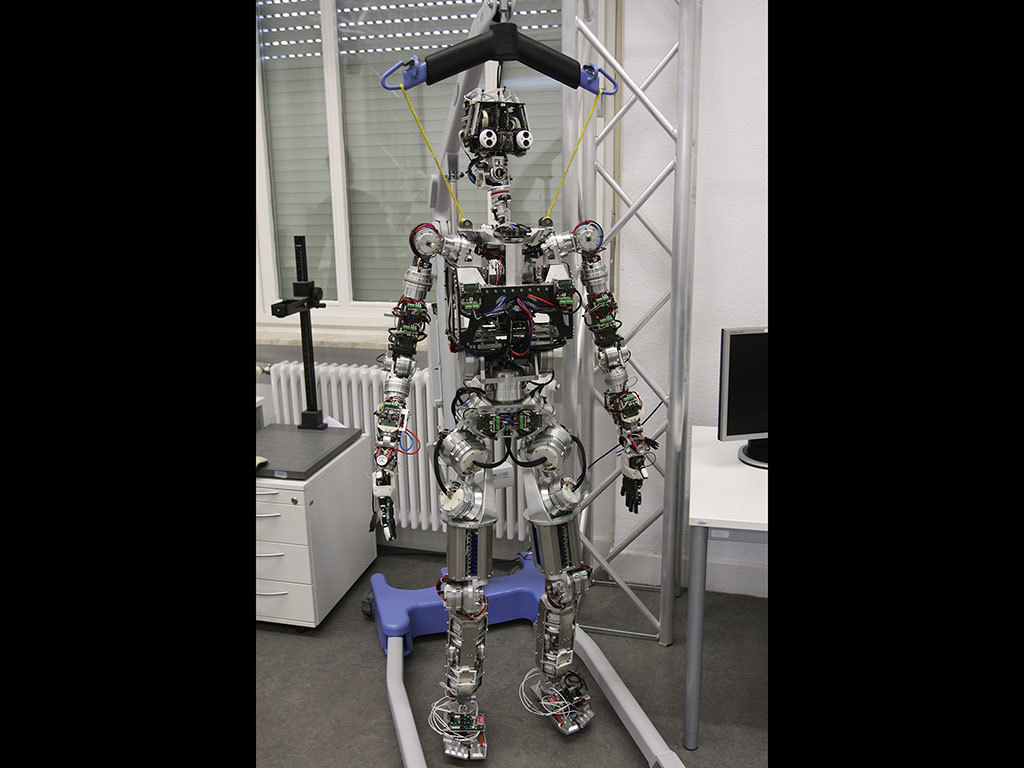
Робот был разработан в рамках Центра совместных исследований роботов-гуманоидов, финансируемого Немецким исследовательским фондом. Исследование сосредоточено на разработке и внедрении универсальных роботов, которые могут выполнять задачи в среде, ориентированной на человека, учиться на человеческих наблюдениях и взаимодействовать с людьми естественным образом. Первый робот ARMAR (ARMAR-I) был построен в 2000 году. ARMAR-II, ARMAR-IIIa и ARMAR-IIIb были представлены в 2004, 2006 и 2007 годах соответственно. Руководили проектами профессора Рюдигер Диллманн и Тамим Асфур из Технологического института Карлсруэ. Ожидается, что к концу 2012 года будет представлено следующее поколение ARMAR-IV, двуногого гуманоида с управляемым крутящим моментом 63 степеней свободы.
Видео
Характеристики
| Тип робота | Гуманоиды, Исследования |
| Бренд | Karlsruhe Institute of Technology |
| Страна производитель | Германия |
| Мощность | Аккумулятор на 48 В, от 2 до 3 часов работы или от внешнего источника питания 220 В. |
| Программное обеспечение | ОС Ubuntu 14.04. ArmarX (заказное программное обеспечение). |
| Год разработки | 2017 |
| Высота | 240 см |
| Длина | 60 см |
| Масса | 150 кг |
| Скорость | 3,6 км/ч |
| Датчики | Две системы стереозрения (Roboception rc_visard 160 и две Point Grey Flea 3.0) и датчик RGB-D. 6D датчики силы / момента на запястьях. Датчики в каждом шарнире рычага: датчики абсолютного и инкрементального положения, датчик крутящего момента, 9-осевой IMU. Два лазерных сканера в мобильной базе. |
| Приводы | 16 бесщеточных двигателей постоянного тока с высоким крутящим моментом (RoboDrive) и гармонических приводов. Высокоинтегрированные настраиваемые блоки сенсор-актер-контроллер для рук. По два мотора в каждой руке. |
| Вычисление | Четыре высокопроизводительных ПК с процессором Intel Core i7-6700 3,40 ГГц, 32 ГБ оперативной памяти и 500 ГБ SSD. Один графический процессор GeForce GTX 1080 с 8 ГБ оперативной памяти. |
| Степени свободы (DOF) | 27 (Голова: 2 степени свободы; рука: 8 степеней свободы x 2; руки: 2 степени свободы x 2; торс: 1 степень свободы; мобильная платформа: 4 степени свободы) |
| Материалы | Алюминий и детали, напечатанные на 3D-принтере |
| Стоимость | От 100 000 до 200 000 евро (приблизительно) |
| Ширина | 60 см |
