



")
")
")



")
")












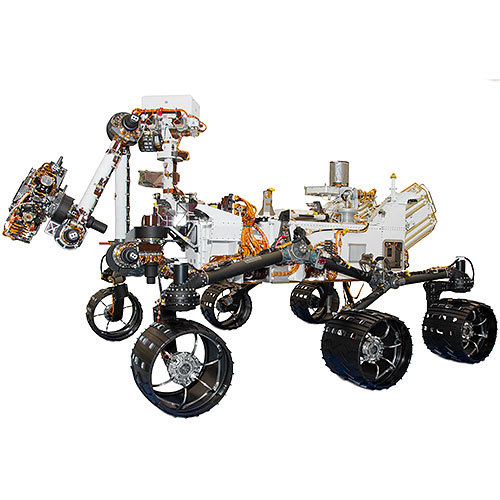

















Робот Curiosity
Curiosity - это роботизированный марсоход, который приземлился на Марсе в августе 2012 года. Он наполнен научными инструментами, и его цель - выяснить, были ли когда-либо на Марсе условия окружающей среды, благоприятные для жизни.
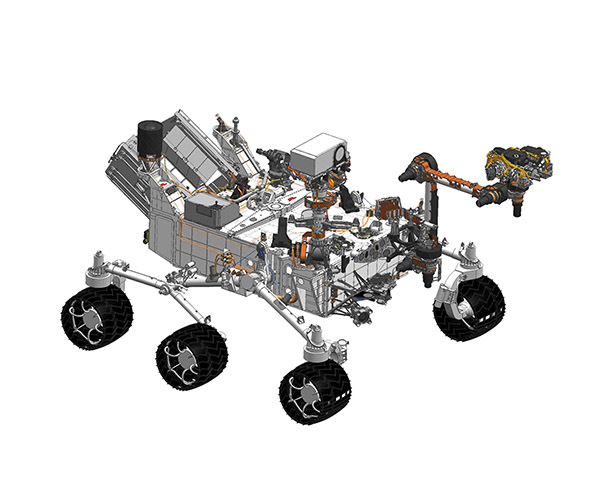
Оснащен 10 научными приборами. Способен анализировать горные породы, собирая образцы или удаляя их с помощью лазера. Способен ездить по пересеченной местности.
Описание
- Программное обеспечение Curiosity содержит более 500 000 строк кода.
- Марсоход оснащен ядерным источником энергии, который может поддерживать его работоспособность в течение многих лет.
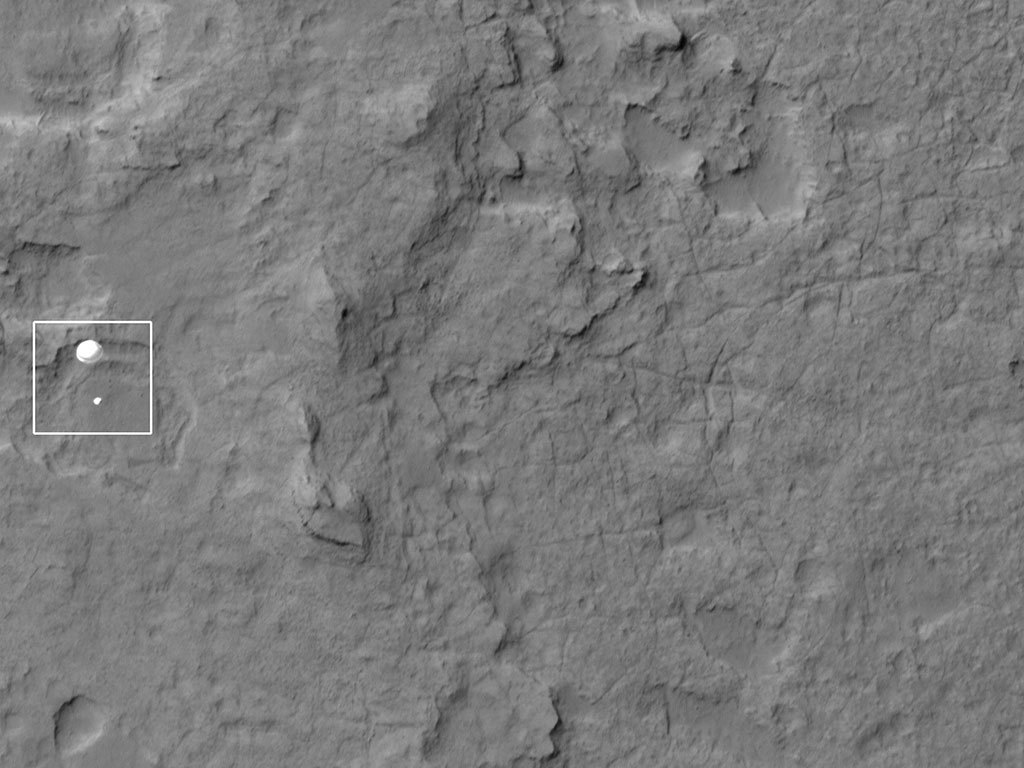
- Чтобы приземлиться на Марсе, «Кьюриосити» использовала сверхзвуковой парашют, за которым следовал «небесный кран», который парил в воздухе с помощью ретроковых ракет и опускал марсоход на землю на тросах.
- Curiosity оснащен каменным лазером, который также эффективен против марсиан.
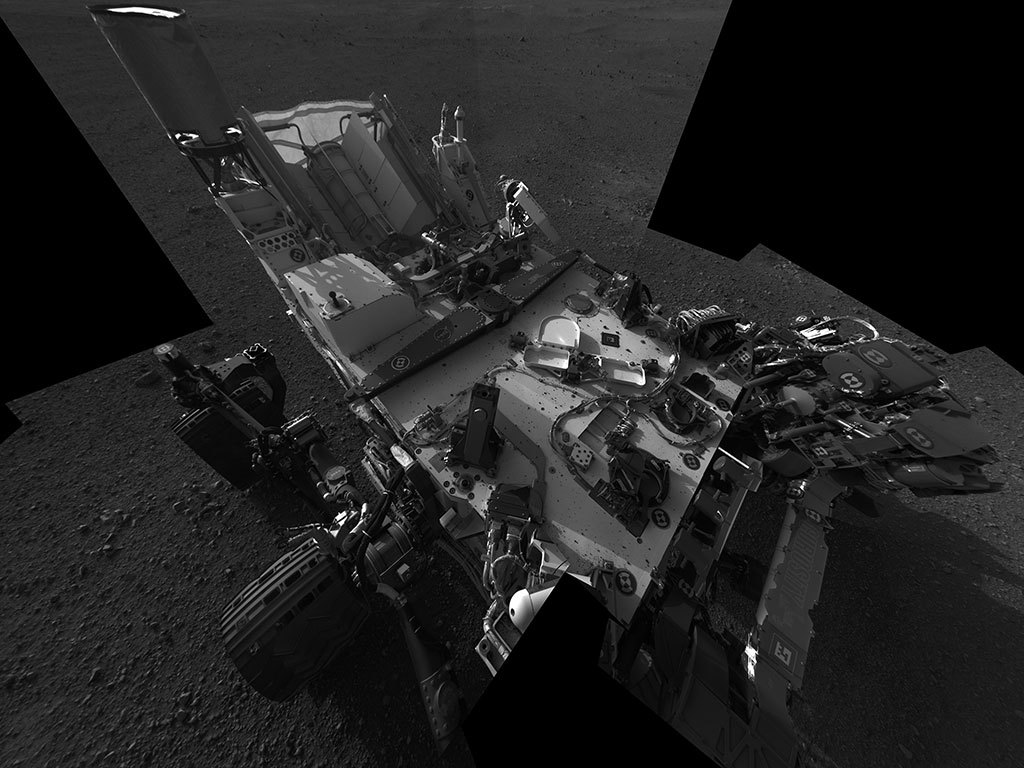
НАСА начало миссию Марсианской научной лаборатории (MSL) примерно в 2004 году в рамках своей долгосрочной программы исследования Марса - исследования Марса роботами. Основная цель - изучить, есть ли в районе кратера Гейла на Марсе свидетельства существования обитаемой среды в прошлом и настоящем. Миссией MSL управляет Лаборатория реактивного движения в Пасадене, Калифорния, которая ранее построила успешные марсоходы Spirit и Opportunity, а до них - Sojourner. Лаборатория реактивного движения завершила создание марсохода Curiosity и его транспортного космического корабля в 2011 году, а запуск состоялся в ноябре 2011 года. Curiosity успешно приземлился в кратере Гейла 6 августа 2012 года. Сейчас он изучает климат и геологию планеты с помощью 10 различных научных инструментов, разработанных международной командой. Общая стоимость проекта MSL, включая оборудование, разработку и эксплуатацию.
Видео
Характеристики
| Тип робота | Аэрокосмическая промышленность |
| Бренд | NASA Jet Propulsion Laboratory |
| Страна производитель | США |
| Мощность | Радиоизотопный термоэлектрический генератор (преобразует тепло плутония-238 в электричество). |
| Программное обеспечение | Бортовое программное обеспечение полета (отслеживает и управляет космическим кораблем на всех этапах миссии, проверяет наличие команд для выполнения и выполняет функции связи). |
| Год разработки | 2011 |
| Высота | 210 см |
| Длина | 300 см |
| Масса | 899 кг |
| Скорость | 0,14 км/ч |
| Датчики | 17 камер (три основные научные камеры и различные навигационные камеры), четыре спектрометра, два детектора излучения, датчик окружающей среды и датчик атмосферы. |
| Приводы | 10 приводов для колес, три для мачты дистанционного зондирования, два для антенны с высоким коэффициентом усиления, пять для движений руки, три для ударной дрели, один для инструмента для удаления пыли, четыре для обработки проб и совка, три для крышек входных отверстий для проб, два для насосов в контуре теплоносителя и еще примерно 10 в различных инструментах, например, для фокусировки камеры. |
| Вычисление | Два резервированных главных компьютера (один рабочий и один запасной), каждый из которых работает от BAE Systems RAD 750, радиационно-стойкого процессора 200 МГц с архитектурой PowerPC 750. Каждый компьютер имеет 2 ГБ флэш-памяти, 256 МБ DRAM и 256 КБ EEPROM. |
| Степени свободы (DOF) | 43 (Колесный привод: 1 DoF x 6; Угловое управление: 1 DoF x 4; Мачта дистанционного зондирования: 3 DoF; Антенна с высоким коэффициентом усиления: 2 DoF; Рука: 5 DoF; Ударная дрель: 3 DoF; Инструмент для удаления пыли: 1 DoF; Обработка образцов и совок: 4 DoF; Крышки входных отверстий для образцов: 3 DoF; Насосы на контуре теплоносителя: 2 DoF; Другие инструменты: 10 DoF) |
| Материалы | Основные материалы - алюминий и титан. Шасси, ядро марсохода, имеет изолированные поверхности для размещения электроники. |
| Стоимость | 1,8 миллиарда долларов (разработка полной системы полета миссии, включая марсоход, космический корабль и все инструменты) |
| Ширина | 280 см |
