



")
")
")



")
")













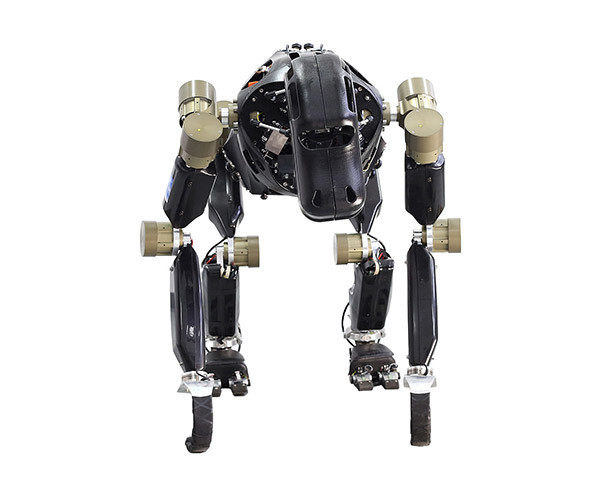








Робот Charlie
Чарли - робот на ногах, который может переключаться между четвероногим и двуногим передвижением. Как шимпанзе, он передвигается на четвереньках, и когда ему нужно что-то схватить, он использует передние конечности.
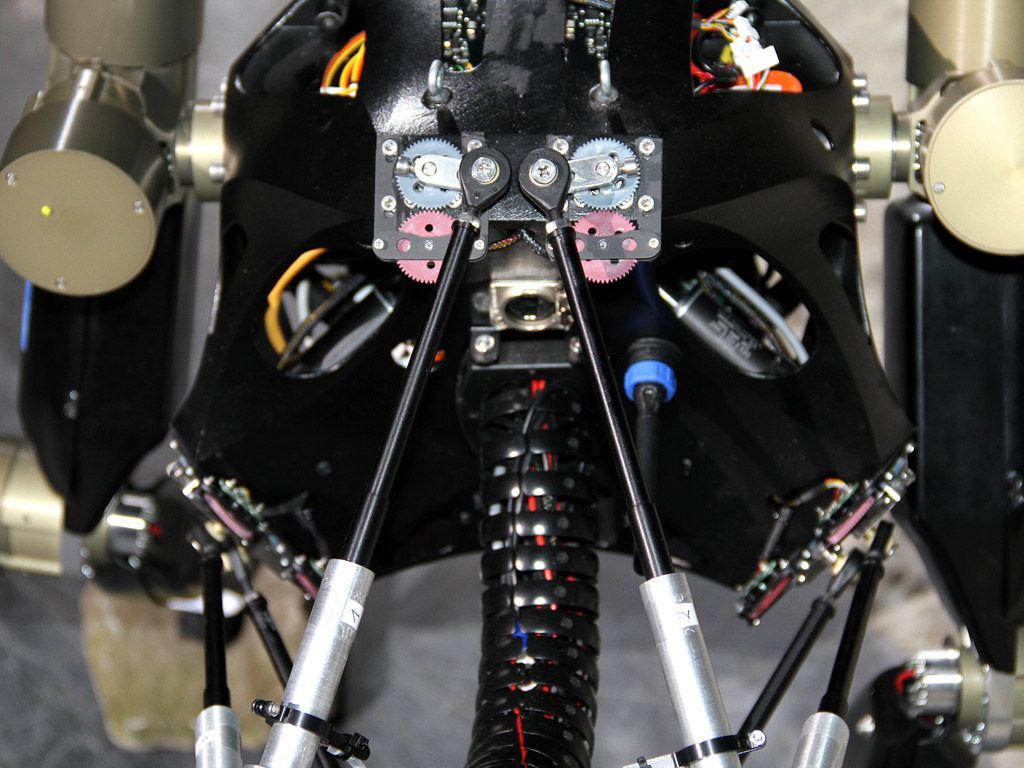
Оснащен механическим стержнем, который изгибается во многих направлениях и измеряет прилагаемые силы и крутящий момент. В ступни встроены тактильные датчики.
Описание
- Чарли основан на шимпанзе, но его создатели были вдохновлены более ранним проектом, в котором участвовал робот-скорпион.
- Создатели робота надеются, что он даст представление о том, как двуногая ходьба развивалась у людей.
- Чарли означает "Комбинированное движение человека и обезьяны-робота" для экспериментов iStruct.
Исследователи из Немецкого исследовательского центра искусственного интеллекта (известного как DFKI), построившие Чарли, давно изучают роботов на ногах. Один из их первых проектов, более 15 лет назад, заключался в обучении гексапода ходить по разным поверхностям. Затем они разработали роботов с восемью ногами на основе биологической модели скорпиона. Эти проекты показали, что роботы на ногах могут улучшить свою маневренность, отслеживая силы контакта между конечностями и землей. Вместе с Чарли команда DFKI хочет разработать сенсорные ножки, которые точно отслеживают наземные силы. Робот сможет реагировать на эти силы, используя активные механизмы, такие как гибкий позвоночник. Чарли, который является частью проекта DFKI iStruct (интеллектуальные структуры),
Видео
Характеристики
| Тип робота | Исследования, Гуманоиды |
| Бренд | DFKI Robotics Innovation Center |
| Страна производитель | Германия |
| Мощность | Литий-полимерный аккумулятор 48 В, 2400 мАч, 1 час работы |
| Программное обеспечение | ОС Linux и специализированное программное обеспечение для управления с C, C ++ и VHDL. |
| Год разработки | 2012 |
| Высота | 75 см |
| Длина | 54 см |
| Масса | 21,7 кг |
| Скорость | 1 км/ч |
| Приводы | Семь бесщеточных двигателей постоянного тока на каждой задней конечности; 4 бесщеточных двигателя постоянного тока на каждой передней конечности; 6 бесщеточных двигателей постоянного тока для приведения в действие позвоночника; 6 бесщеточных двигателей постоянного тока для приведения в действие головы. |
| Вычисление | ARM Cortex-A8 и беспроводной 802.11b / g внутри туловища. Индивидуальный контроллер на базе ПЛИС на каждом стыке. |
| Степени свободы (DOF) | 36 (Голова: 6 степеней свободы; задняя конечность: 8 степеней свободы x 2; передняя конечность: 4 степени свободы x 2; позвоночник: 6 степеней свободы) |
| Материалы | Позвоночник: углеродное волокно и алюминий. Корпус и ножки: алюминий. Ножки: фрезерованный алюминий и пластик. |
| Ширина | 44 см |
