



")
")
")



")
")












Робот LAURON V















Робот LAURON V
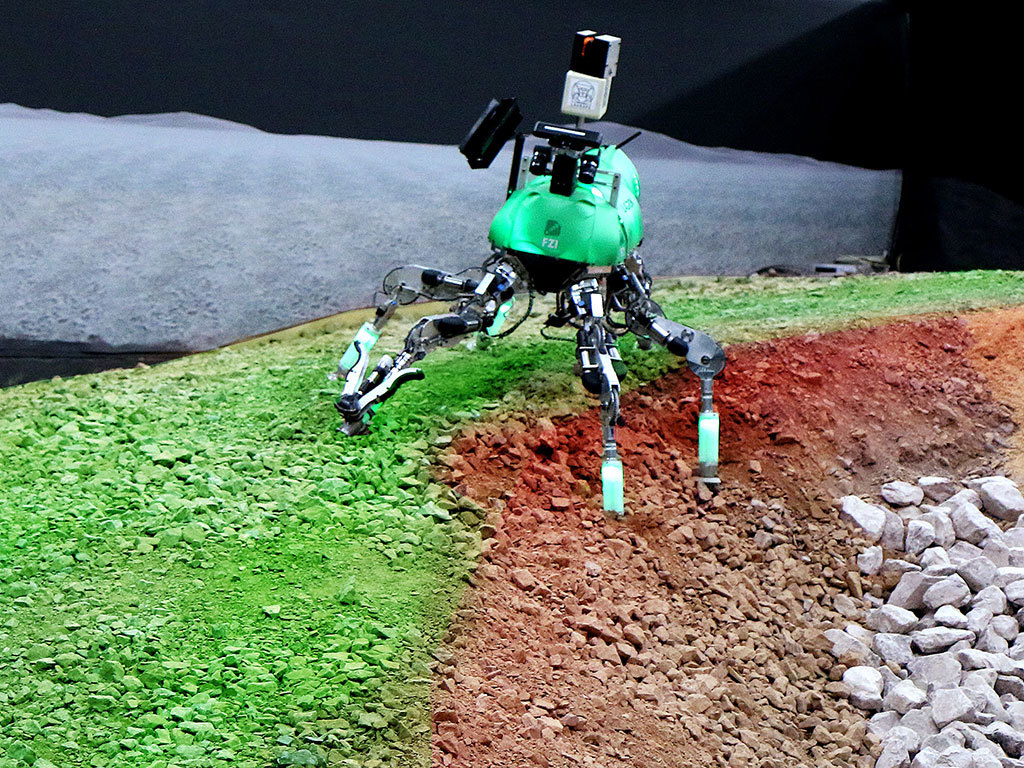
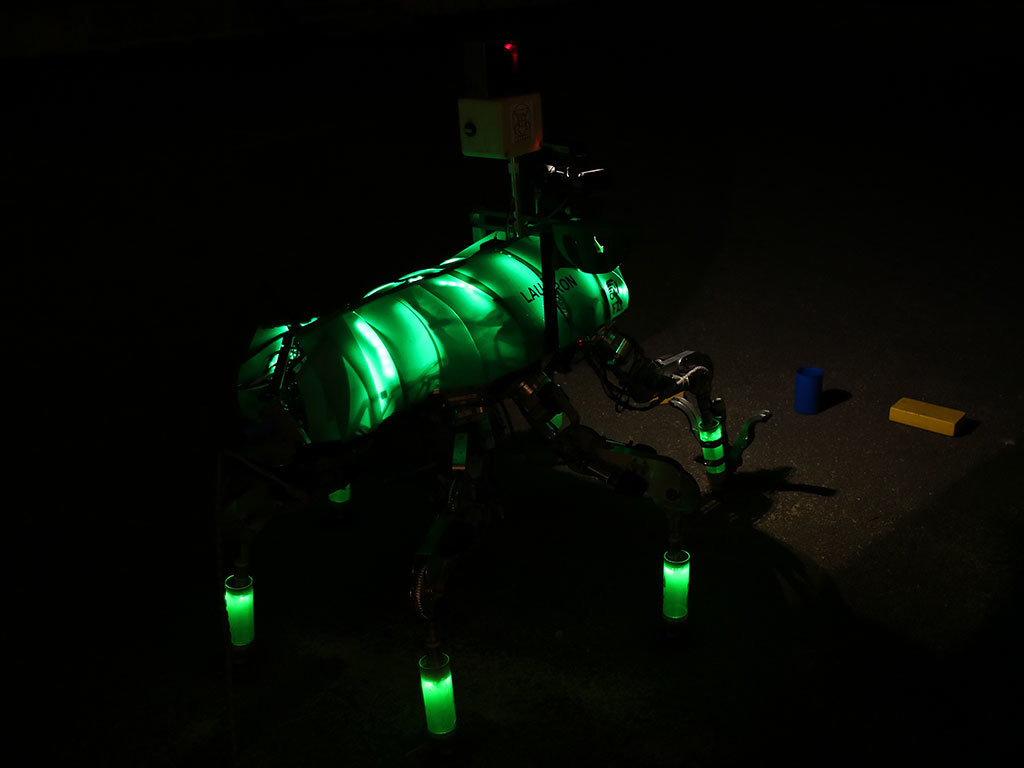
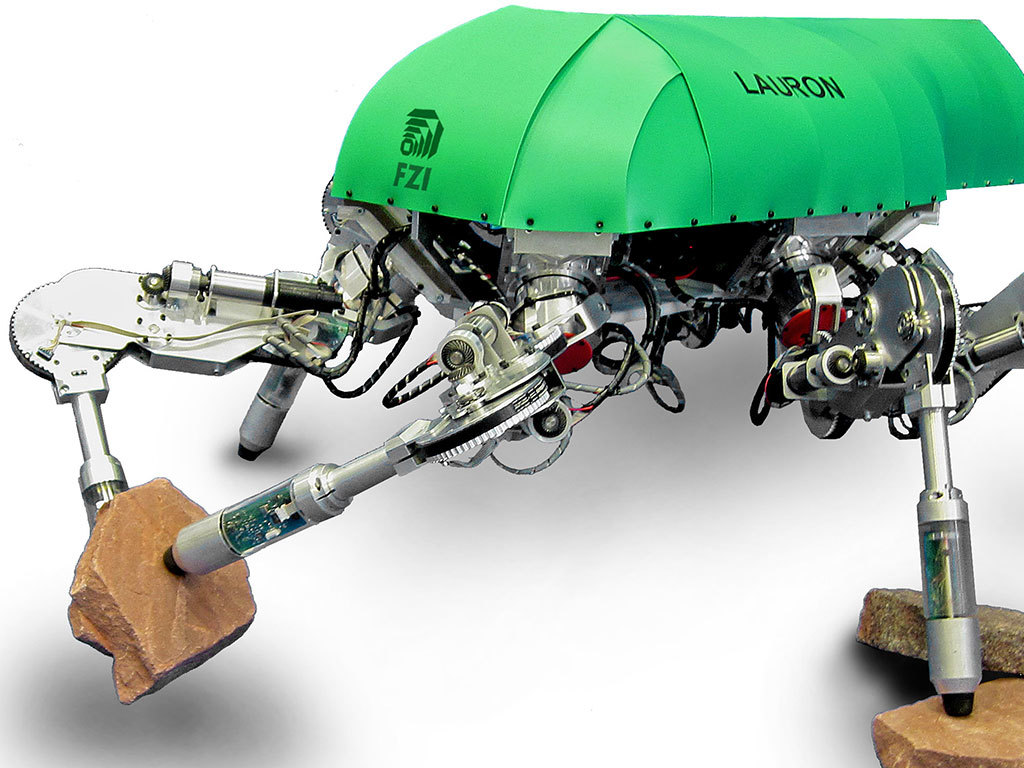
LAURON V - это шестиногий шагающий робот, созданный на основе биологических материалов, разработанный для работы в областях, которые были бы трудными для колесных систем. Он несет научную полезную нагрузку для наблюдения за окружающей средой и может использовать свои ноги для мобильных манипуляций.
Человеческая антропометрия. Оснащен гидроприводами с приводом от бортового насоса. Кузов имеет защитные покрытия.
Описание
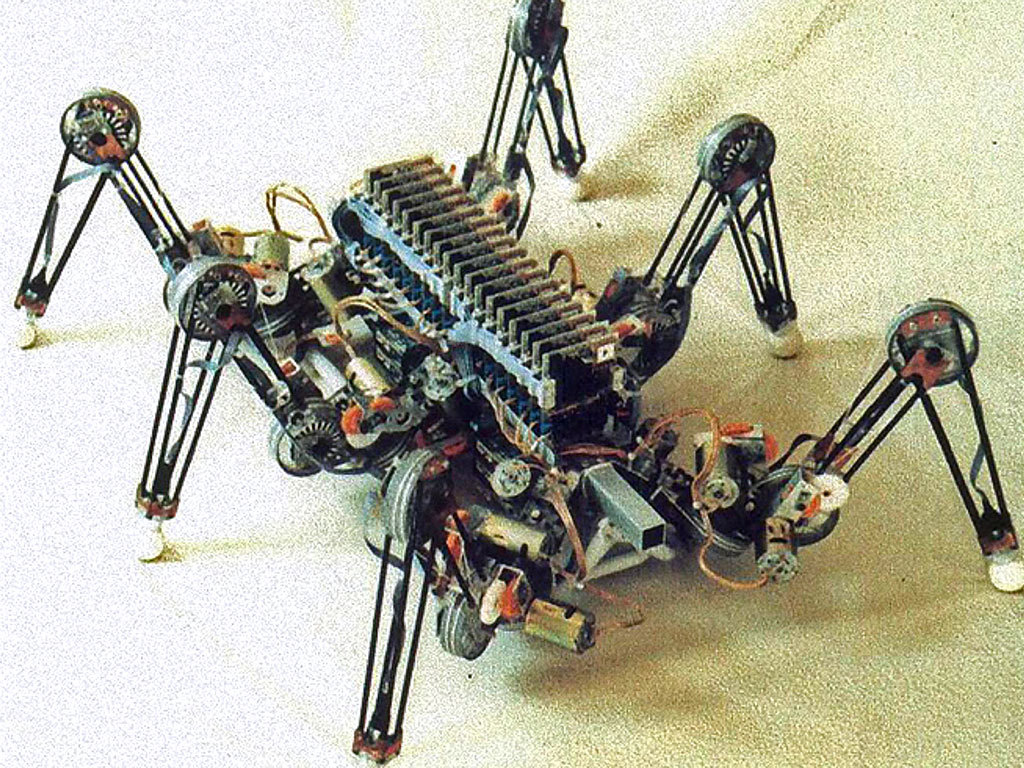
- Название LAURON расшифровывается как LAUfRoboter Neuronal Gesteuert, что на английском языке означает «шагающий робот с нейронным управлением», поскольку изначально робот полностью контролировался нейронными сетями.
- Первый LAURON является частью постоянной коллекции Немецкого музея в Мюнхене, в которой представлены чудеса техники и инженерии.
- То, как LAURON двигает ногами, было математически оптимизировано, в результате углы и положения были очень похожи на палочника, который служит биологическим источником вдохновения для робота.
Видео
Характеристики
| Бренд | FZI Research Center for Information Technology |
| Страна производитель | Германия |
| Дата выпуска | 2013 |
| Мощность | Два литий-полимерных аккумулятора на 24 В, 8000 мАч, подключенные параллельно, 2 часа работы. Возможность горячей замены аккумуляторных блоков во время работы. Внешнее питание от лабораторного источника питания на 24 В (5-20 А, ~ 10 А основное питание) можно использовать "на лету". |
| Программное обеспечение | Ubuntu 14.04 с ROS Indigo для управления высоким уровнем и MCA2 для управления низким уровнем. Управление высокого уровня осуществляется в рамках PLEXNAV, обеспечивая планирование на основе OMPL, OpenCV и распознавание объектов и среды на основе PCL, управление задачами на основе SMACH, 3D SLAM с настраиваемыми алгоритмами, настраиваемые исполнители движения и многие другие пакеты, написанные и открытые на заказ источник. Низкоуровневое управление реализовано в настраиваемой структуре MCA2 (Modular Controller Architecture) с использованием подхода, основанного на поведении. Быстрое поведение определяет моменты ног (раскачивание, стойка, рефлекс удара о препятствие), в то время как поведение более высокого уровня сохраняет стабильность всей системы. Контроллеры двигателей работают с каскадными ПИД-регуляторами положения. |
| Высота | 61 см |
| Длина | 90 см |
| Масса | 43,5 кг |
| Скорость | 0,5 км/ч |
| Датчики | Каждая опора имеет четыре шарнира с энкодерами Avago HEDS9040-B00 и колесами с пользовательским кодом, а также мониторинг тока для каждого двигателя с помощью специальных плат UCOM. Голова оснащена Asus Xtion Pro Live, двумя камерами высокого разрешения Point Grey Firefly (FMVU-12S2C) с теле- и широкоугольными объективами или стереокамерой, а также тепловизионной камерой FLIR. На задней панели корпуса находится дополнительная камера Asus Xtion Pro Live (для визуальной одометрии), Velodyne HDL-32E или специальный лазерный 3D-сканер (KaRoLa) с использованием Hukuyo UTM-30LX, абсолютного кодировщика Avago и Microstrain 3DM-GX5 IMU. . Дополнительные датчики добавляются в зависимости от миссии. |
| Приводы | Всего 28 моторов. Каждая стойка имеет четыре шарнира, приводимых в действие щеточными двигателями постоянного тока Faulhaber 2657 012CR с планетарными редукторами 26 / 1S (передаточное отношение 66: 1 и 159: 1). Два двигателя установлены сбоку на ноге и приводят в движение суставы по цепи (дополнительное соотношение 2: 1). Два двигателя установлены внутри корпуса и приводят в действие моменты через специальные редукторы, включая червячный привод. В головке используются два меньших щеточных двигателя постоянного тока Faulhaber с изготовленным на заказ приспособлением, напечатанным на 3D-принтере, и ременным приводом. В захвате и вращающемся лазерном сканере используются бесщеточные двигатели Faulhaber 2250S024BX4 CSD со встроенным контроллером. |
| Вычисление | Главный компьютер (поведение и контроль высокого уровня): плата Mini ITX (GIGABYTE GA-H87N-Wifi) с Intel Core i7 4x3,0 ГГц, 8 ГБ ОЗУ, Ethernet и связь по CAN. Компьютер технического зрения (обнаружение объектов, визуальная одометрия): Intel NUC i7. Контроллер ноги (низкоуровневое управление двигателем): универсальный модуль контроллера UCOM, настраиваемый с помощью DSP и FPGA, обеспечивающий управление в реальном времени, считывание квадратурного энкодера, измерения тока, процедуры инициализации, синхронизацию и связь. Дополнительный контроллер: Arduino для управления освещением и Raspberry Pi для лазерного 3D-сканера. |
| Степени свободы (DOF) | 28 (Ноги: 4 DoF x 6; Голова: 2 DoF; Захват: 1 DoF; Лазерный сканер: 1 DoF) |
| Материалы | Ножки изготовлены из алюминия авиационно-космического назначения. Наружная часть оболочки - фрезерованная пластина из POM (основание), часть - PLA, напечатанный на 3D-принтере (крышки основания), и часть - из полиэтилена специальной резки (структура оболочки). Головка и многие крышки для шестерен, датчиков и надставки, такие как ящик для хранения, напечатаны на 3D-принтере из PLA. В редукторах используются высокоточные латунные червячные передачи. Все детали были изготовлены по индивидуальному заказу, фрезерованы или отпечатаны. |
| Стоимость | € 150 000 (приблизительно) |
| Ширина | 80 см |
Нашли дешевле?
