



")
")
")



")
")












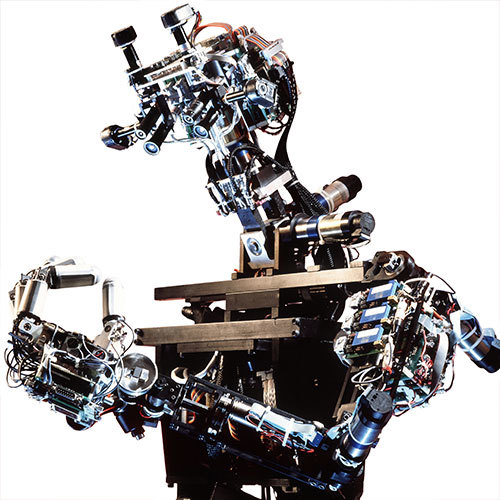
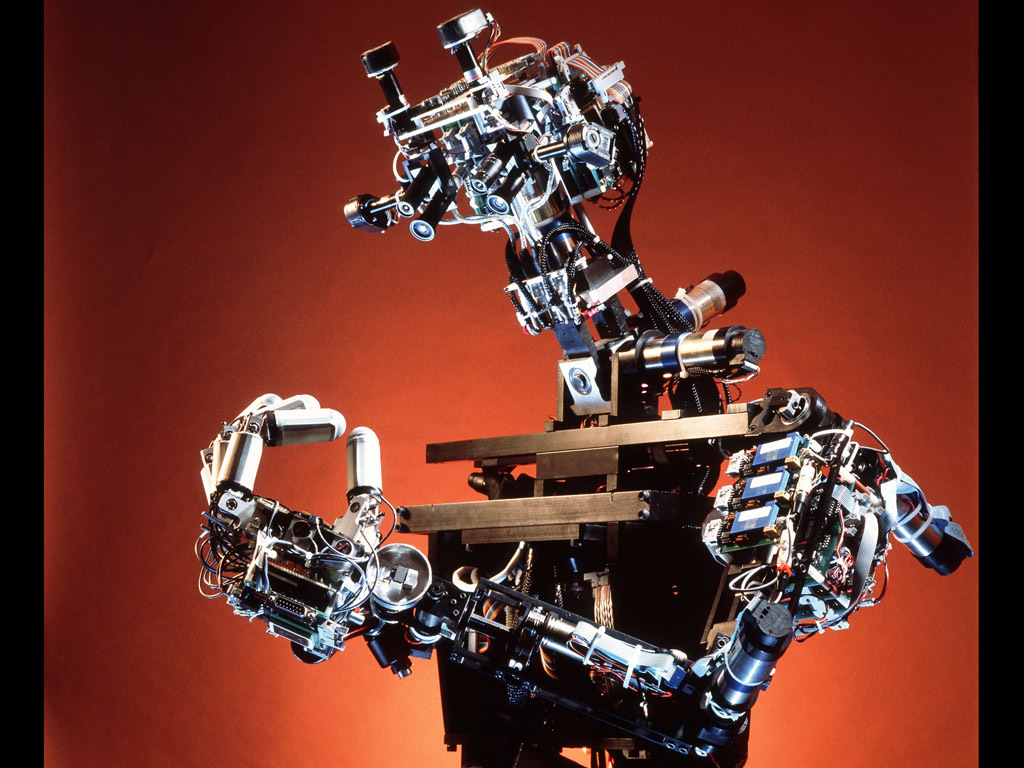












Робот Cog
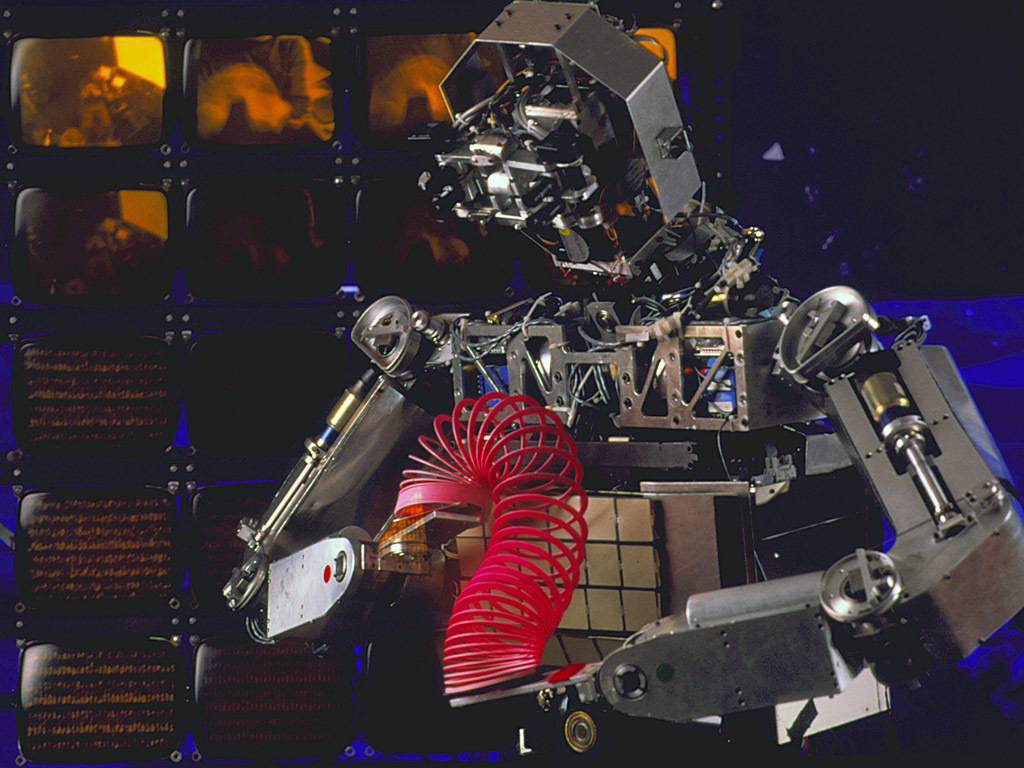
Cog был роботом-гуманоидом, разработанным группой Родни Брукса в Массачусетском технологическом институте в качестве платформы для изучения познания роботов. Он мог отслеживать лица, хватать предметы и, что, пожалуй, самое известное, играть с Slinky.
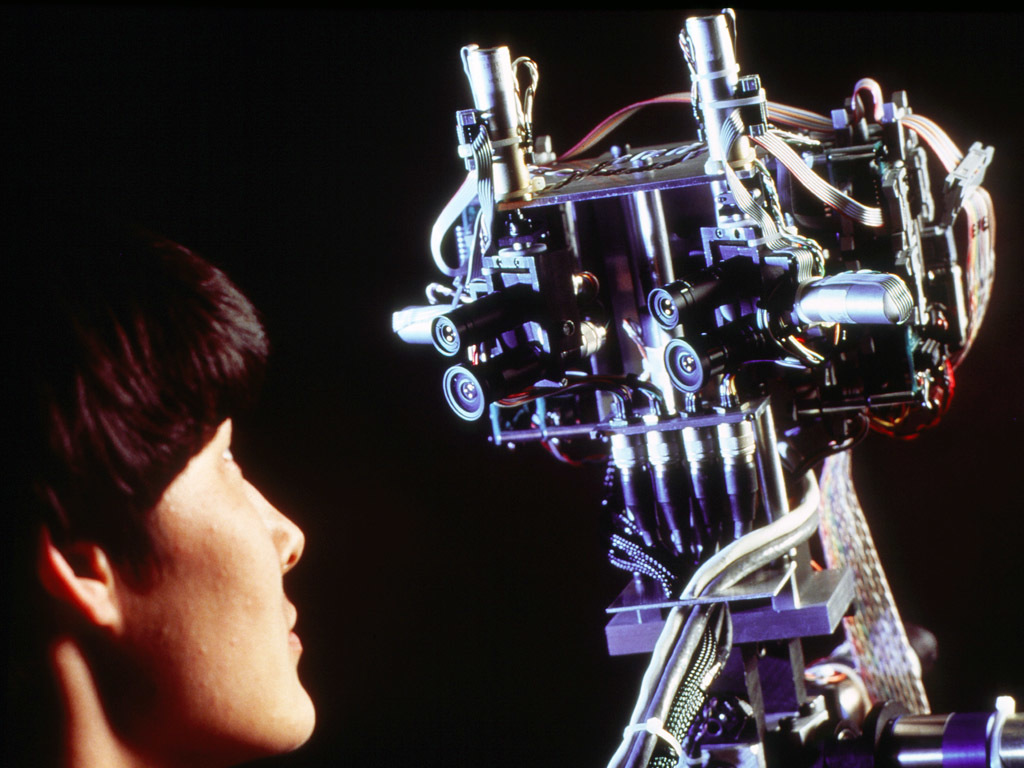
Способен распознавать объекты и достигать визуальной цели. Оснащен последовательными упругими приводами для более безопасной работы рядом с людьми.
Описание
- Название «Винтик» - это игра термина «познание» и механического винтика.
- Ког сейчас на пенсии и живет в стеклянной коробке в музее Массачусетского технологического института в Кембридже, штат Массачусетс.
- Родни Брукс сказал, что главным источником вдохновения для создания Cog был HAL из фильма «2001».
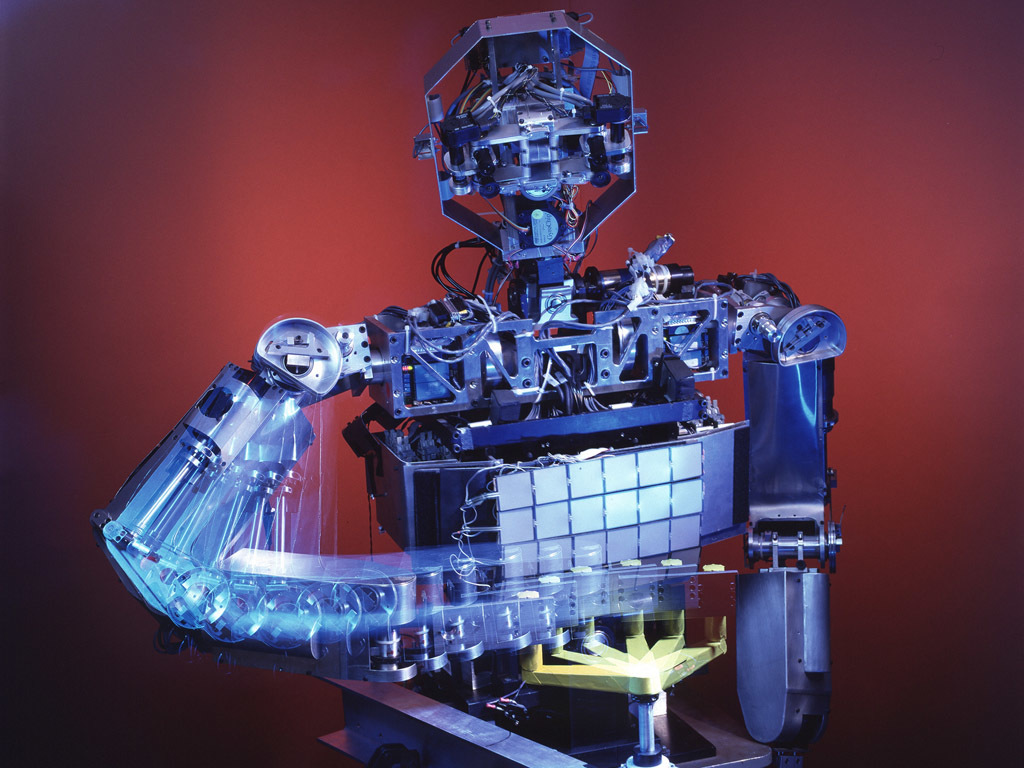
Разработка Cog началась в 1993 году. Первое воплощение робота представляло собой верхнюю часть туловища с 14 степенями свободы, одной рукой и элементарной визуальной системой. Позже робот был модернизирован, и в него были включены две руки, голова и другие датчики. Над роботом работали многие аспиранты, в том числе Брайан Скасселлати (ныне профессор Йельского университета), Аарон Эдсингер (основатель Meka Robotics) и Синтия Бризил (ныне профессор Массачусетского технологического института). Не было ни чертежей, ни схем. «Робот - это всего лишь взломщик« временного решения », скрепляемый липучкой, проводом 24AWG и припоем», - написали исследователи на своем веб-сайте полушутя. Cog был одним из первых роботов-гуманоидов, которые использовали последовательные упругие приводы: двигатели на руках были последовательно соединены с суставами с помощью торсионной пружины,
Видео
Характеристики
| Тип робота | Гуманоиды, Исследования |
| Бренд | MIT |
| Страна производитель | США |
| Мощность | Внешний источник питания |
| Год разработки | 1993 |
| Высота | 172 см |
| Масса | кг |
| Приводы | Эластичные приводы серии для рук и мотор-редукторы постоянного тока в груди. |
| Степени свободы (DOF) | 22 (Руки: 6 степеней свободы x 2; туловище: 3 степени свободы; шея: 4 степени свободы; глаза: 3 степени свободы) |
| Ширина | 200 см |
