



")
")
")



")
")












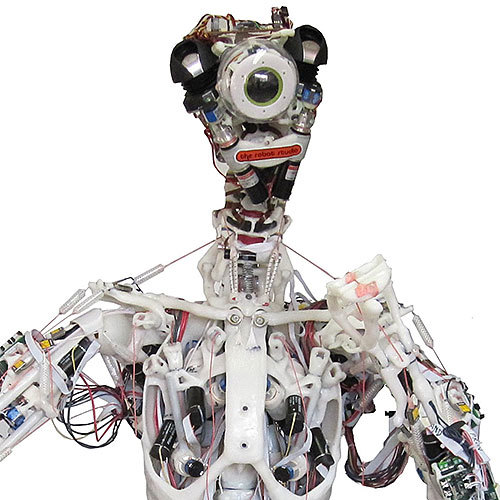










Робот ECCE
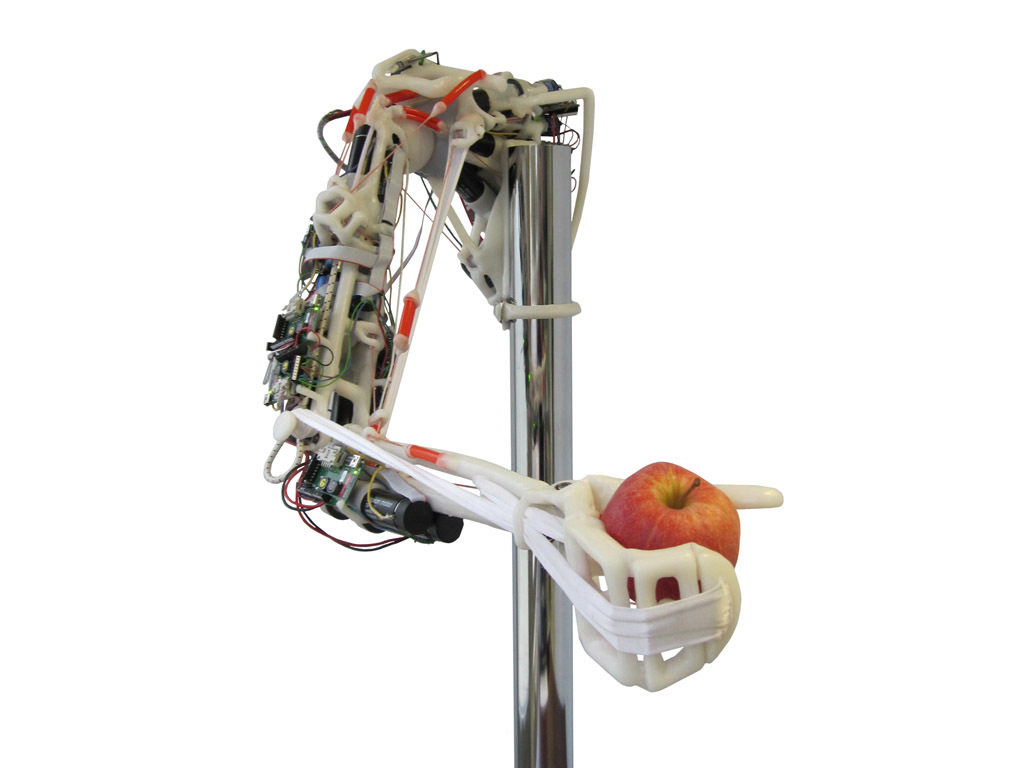
ECCE - это робот-гуманоид, который использует искусственные кости, мышцы и сухожилия, чтобы двигаться, как вы. Он может безопасно общаться с людьми, в том числе обниматься. То есть, если кто-нибудь когда-нибудь захочет ее обнять.
Антропомиметический дизайн. Умеет вести разговор по Skype, при этом направление головы и жесты контролируются удаленным оператором.
Описание
- ECCE означает «Воплощенное познание и соответствующая инженерия».
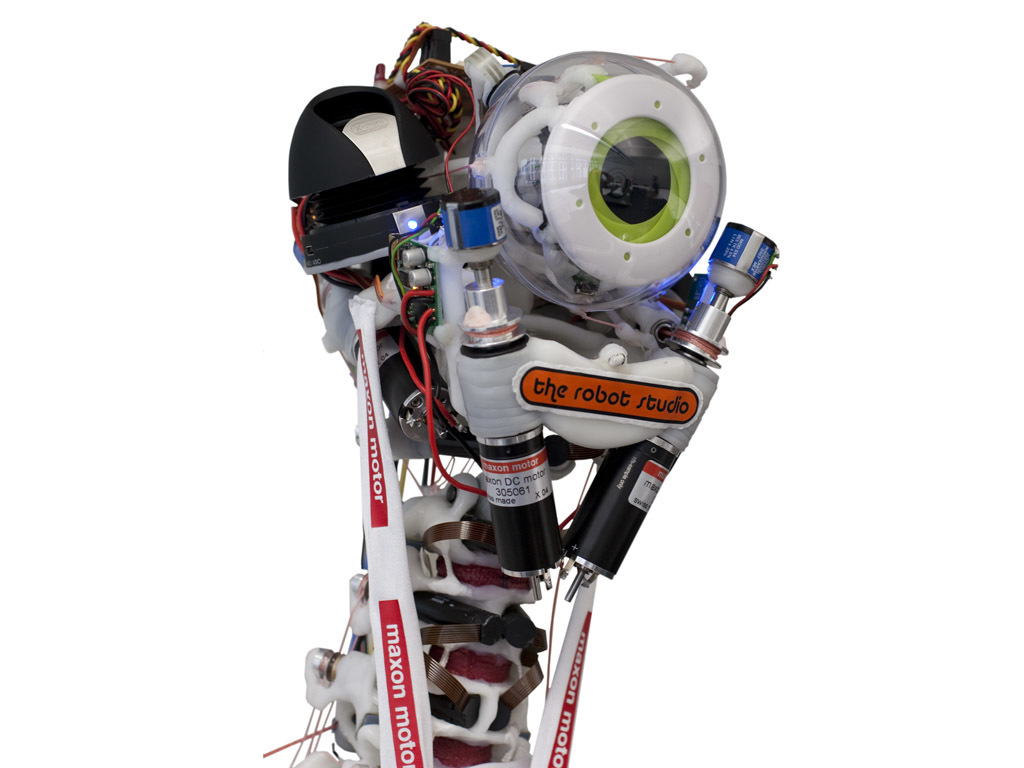
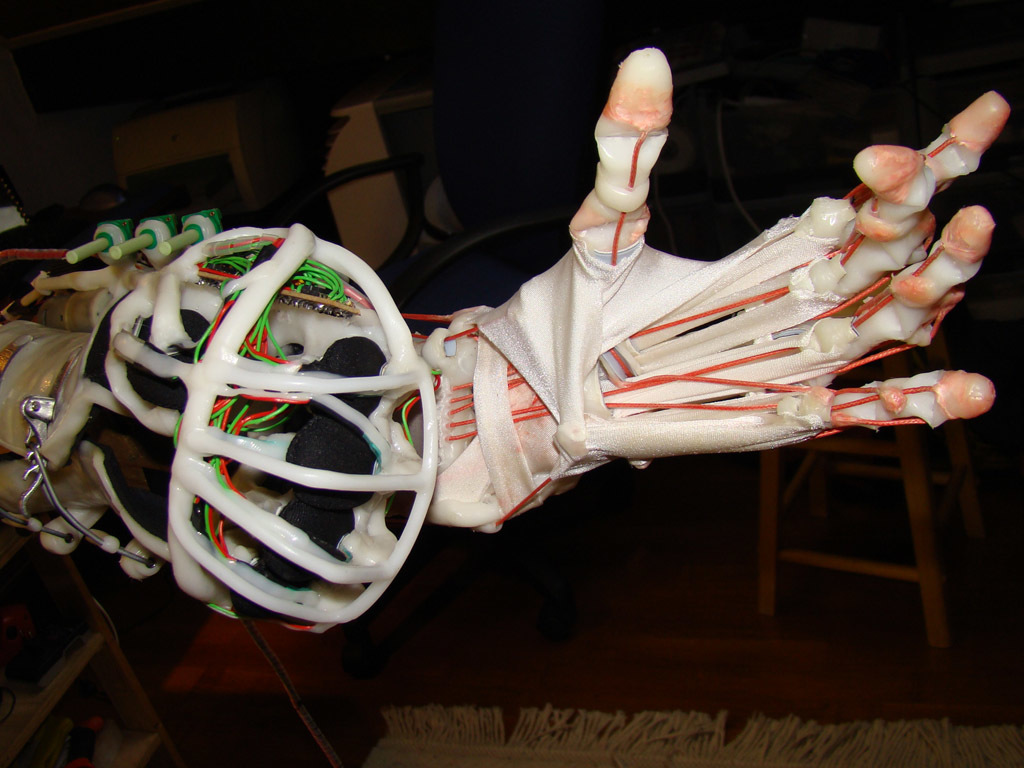
- Кости и суставы ECCE сформированы из полиморфа, типа пластика, который можно легко изменить, нагревая его.
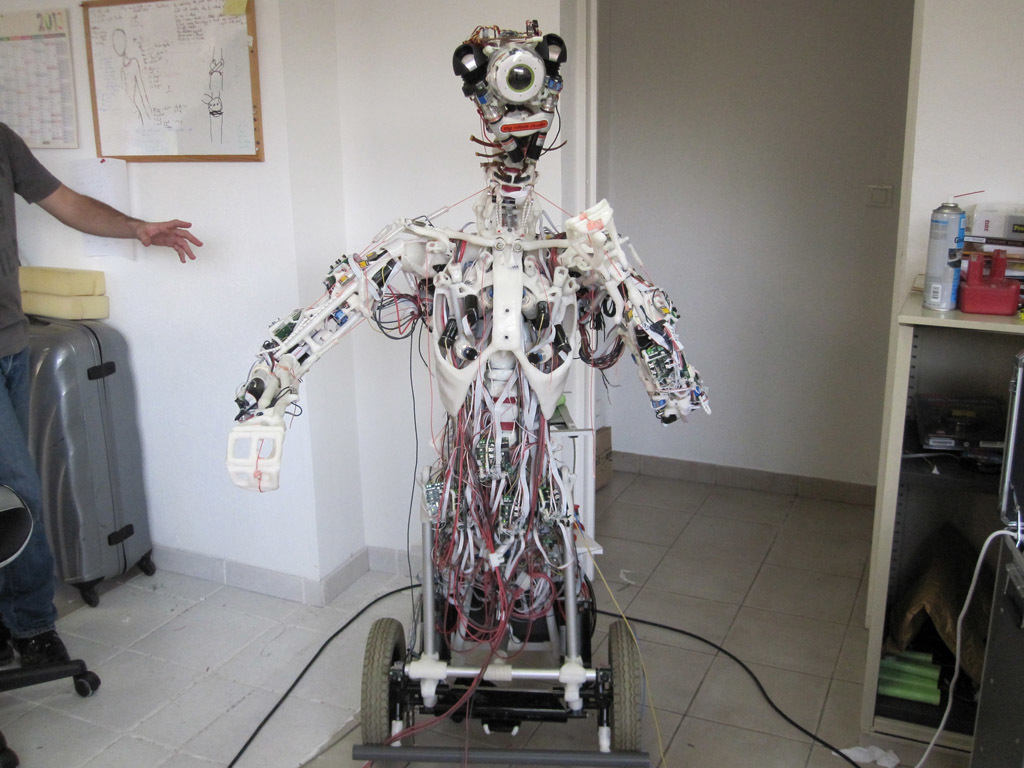
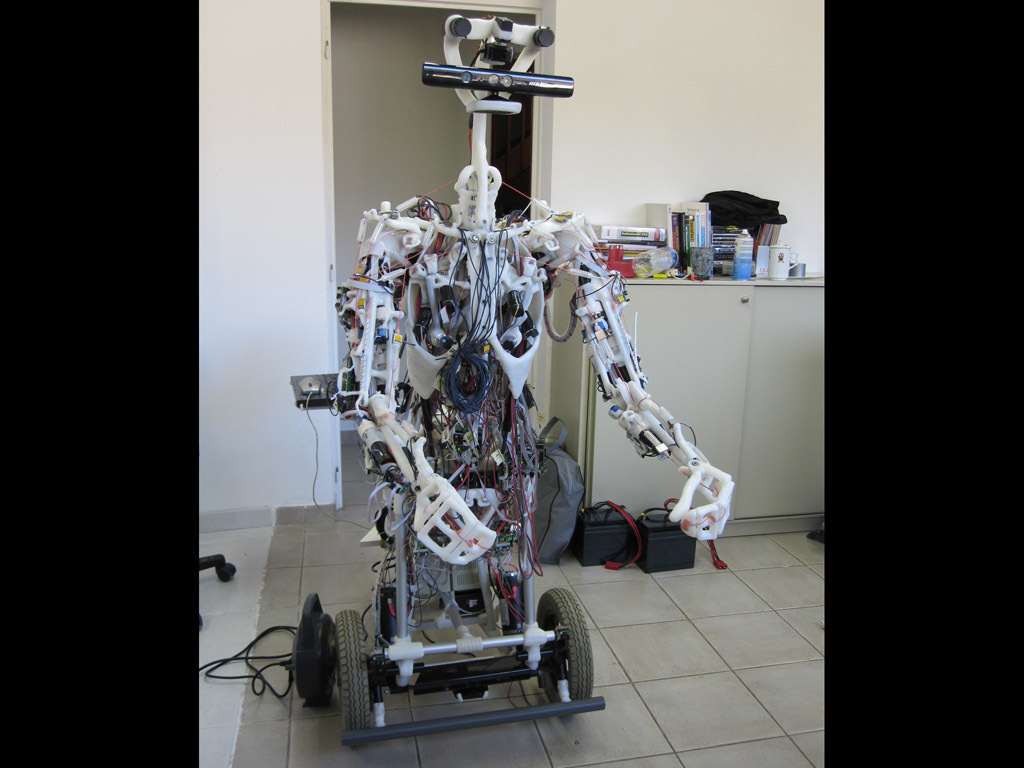
Серия роботов ECCE была спроектирована и построена в рамках проекта ECCEROBOT (воплощение познания в роботе с соответствующей конструкцией), финансируемого Европейской комиссией. В рамках проекта были созданы три робота: ECCE1, ECCEROBOT2 Design Study (EDS) и ECCE3. Все роботы были спроектированы и построены The Robot Studio. Более поздние роботы включали электронные компоненты и управляющее программное обеспечение, разработанное Мюнхенским техническим университетом (TUM). Дополнительные программные компоненты для моделирования, управления и анализа были разработаны Сассекским университетом, TUM, Белградским университетом и Цюрихским университетом. ECCE1 был представлен в 2009 году; модель EDS была представлена в 2010 году, а ECCE3 - в 2011 году. ECCE3, которая имеет упрощенные руки и шею, установлена на колесной базе и включает в себя дополнительные датчики, электронику и программное обеспечение от университетов-партнеров.
Видео
Характеристики
| Тип робота | Гуманоиды, Исследования |
| Бренд | The Robot Studio and ECCEROBOT Project |
| Страна производитель | Франция |
| Мощность | Источник питания 12 В |
| Программное обеспечение | Кастомные прошивки от Robot Studio и ТУМ. Программное обеспечение для Linux / ПК от нескольких участников проекта (включая симулятор робота ECCEOS, управляемый сухожилиями). |
| Год разработки | 2009 |
| Высота | 105 см |
| Длина | 22 см |
| Масса | 26 кг |
| Датчики | Камера, микрофон, датчики длины мышц, датчики напряжения, датчики тока двигателя и датчики положения. |
| Приводы | Двигатели постоянного тока |
| Вычисление | ПК, подключенный к распределенной сети микроконтроллеров по шине CAN или i2c. |
| Степени свободы (DOF) | 60 (Рука: 2 DoF x 2; Рука: 2 DoF x 2; Плечо: 9 DoF x 2; Лопатка: 5 DoF x 2; Голова, шея и позвоночник: 24 DoF) |
| Материалы | Пластиковый каркас. |
| Стоимость | € 250 000 |
| Ширина | 48 см |
