



")
")
")



")
")












Робот HRP-2

















Робот HRP-2
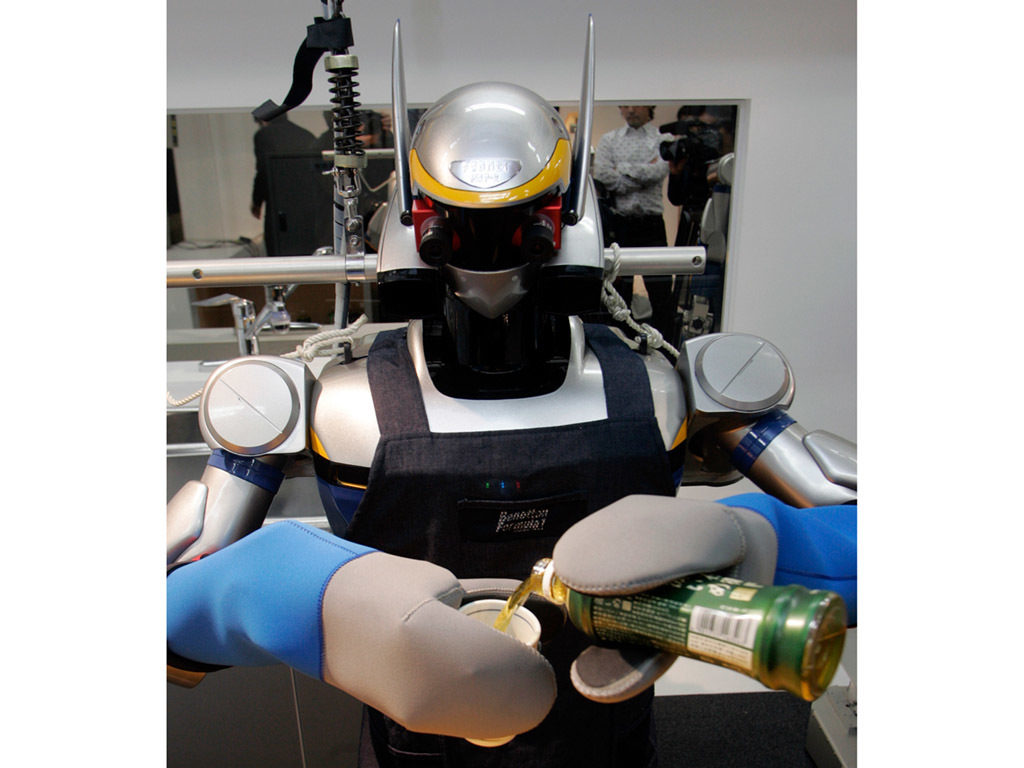
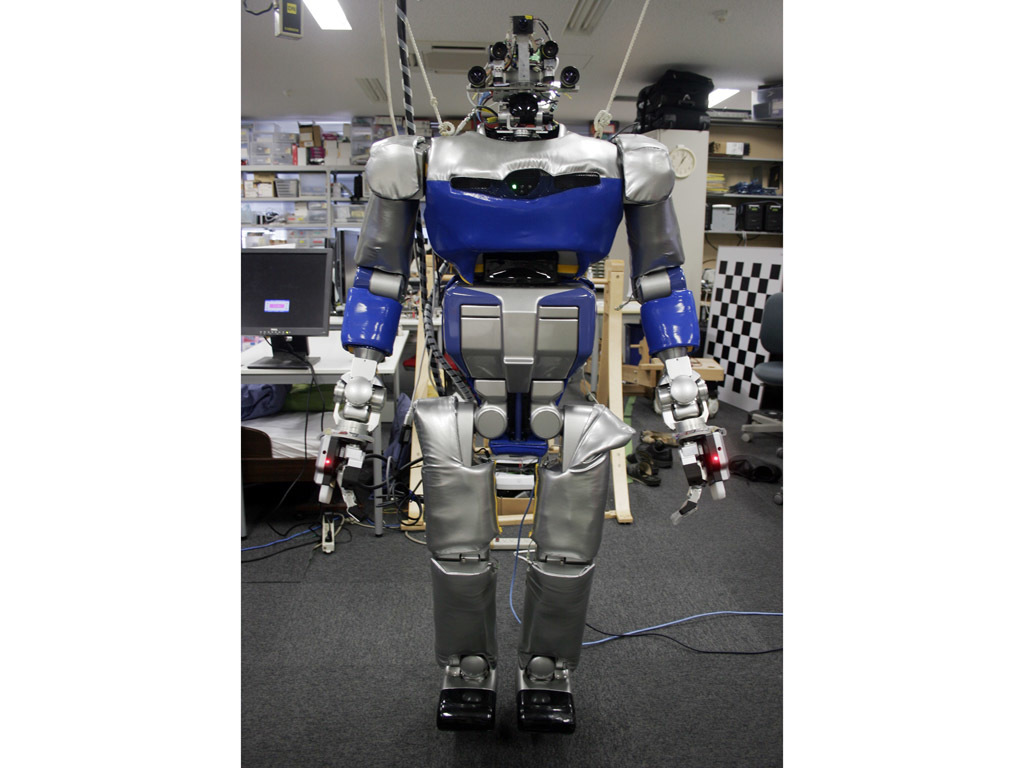
HRP-2 - популярный исследовательский гуманоид с заведомо футуристическим внешним видом. Он может вместе с людьми поднимать тяжелые предметы, ходить по неровным поверхностям и даже самостоятельно вставать, если упадет.
- Внешний вид HRP-2 был создан Ютакой Изубучи, дизайнером, известным своими аниме-роботами.
- Специальная компактная батарея и электрическая система означают, что HRP-2 не нужен «силовой рюкзак», как многим другим большим гуманоидным роботам.
- Открытая архитектура и мощные инструменты моделирования. Оснащен «консольным паховым суставом» для ходьбы в ограниченном пространстве.
Видео
Характеристики
| Тип робота | Гуманоиды, Исследования |
| Бренд | Kawada Industries and AIST |
| Страна производитель | Япония |
| Мощность | Никель-металлогидридная батарея 48 В, 14,8 Ач |
| Программное обеспечение | ОС Linux |
| Год разработки | 2002 |
| Высота | 154 см |
| Длина | 33,7 см |
| Масса | 58 кг |
| Скорость | 2 км/ч |
| Датчики | Три камеры, трехосный гироскоп, трехосевой акселерометр, 30 энкодеров двигателя, шестиосные датчики силы в руках и ногах. |
| Приводы | 30 двигателей постоянного тока |
| Вычисление | Две платы ЦП |
| Степени свободы (DOF) | 30 (голова: 2 степени свободы; рука: 6 степеней свободы x 2; рука: 1 глубина резкости x 2; талия: 2 степени свободы; нога: 6 степеней свободы x 2) |
| Ширина | 65,4 см |
Нашли дешевле?
