



")
")
")



")
")
























Робот PR1
PR1 (Personal Robot One) вместе с ROS (Robot Operating System) были разработаны как мощная и универсальная платформа для разработки робототехники для исследования мобильных манипуляций и разработки приложений.
Во время тестирования PR1 группа Stanford AI Robotics ломала робота более одного раза в день в течение недели. Вот почему в PR2 было вложено столько разработок и испытаний надежности.
Первоначальная цель состояла в том, чтобы создать 10 копий PR1 в Стэнфорде и поделиться ими с лабораториями программного обеспечения робототехники по всему миру, чтобы посеять сообщество ROS.
Описание
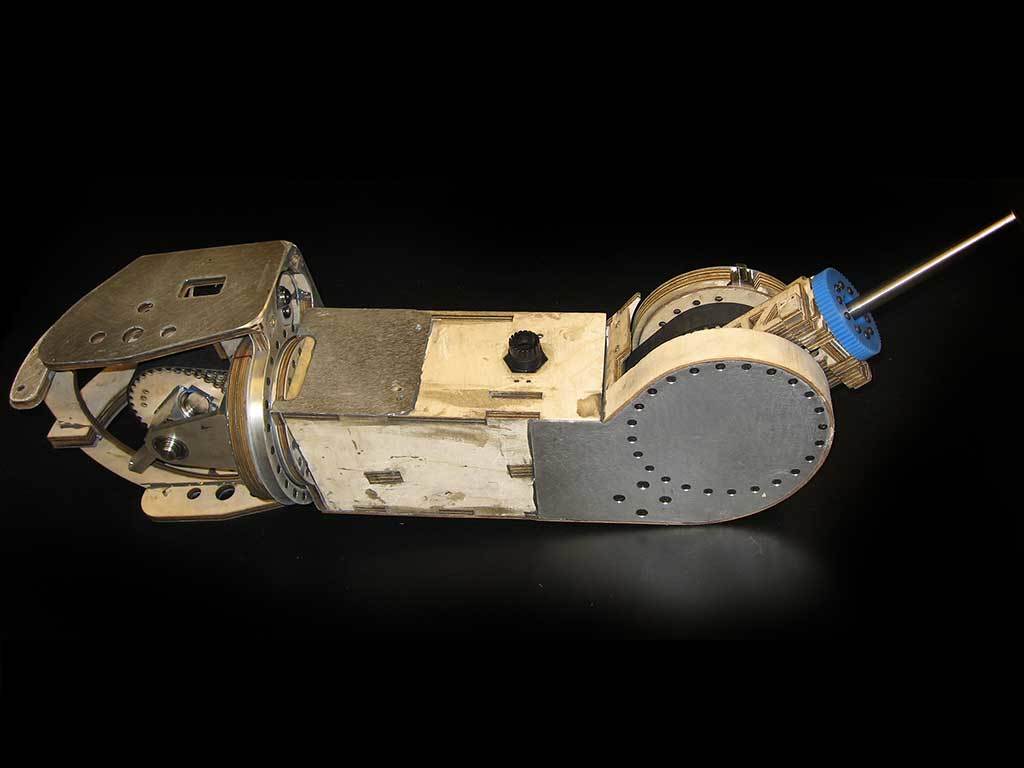
- Механизм гравитационного уравновешивания каждого рычага может управляться одним двигателем, позволяя рычагу пассивно "плавать" на 10 фунтов без использования каких-либо совместных двигателей.
- За исключением алюминия в каждом сочленении, вся надстройка рычагов PR1, плечо, корпус, основание и голова представляют собой вырезанные лазером фанерные детали.
- Захваты PR1 - это отломанные протезы руки.
- PR1 был разработан Кинаном Вайробеком и Эриком Бергером в рамках программы персональных роботов Стэнфордского университета.
Задвижка, пассивная пружина уравновешивает рычаги с 7 степенями свободы. Руки, захваты, голова, телескопический позвоночник и подвижное основание управляются вместе с частотой 1 кГц для плавного движения всего тела. Несколько бортовых компьютеров, аккумуляторная батарея и сенсорная головка.
Видео
Характеристики
| Тип робота | Исследования, Гуманоиды |
| Бренд | Stanford Personal Robotics Program |
| Страна производитель | США |
| Мощность | Энергосистема мощностью 2 кВт с временем работы от 4 до 8 часов, в основном в зависимости от использования компьютера |
| Программное обеспечение | ROS <1.0 |
| Год разработки | 2008 |
| Высота | 120 см |
| Длина | 60 см |
| Масса | 98 кг |
| Скорость | 7.2 км/ч |
| Датчики | Контроль силы в каждом суставе. Видеорегистратор в голове. |
| Приводы | 25 моторов |
| Вычисление | Два компьютера малого форм-фактора Pentium M |
| Степени свободы (DOF) | 23 (рука: 4 степени свободы x2; регулировка противовеса: 1 глубина резкости x 2; запястье: 3 степени свободы x 2; захват: 1 глубина резкости x 2; голова: 1 глубина резкости; туловище: 2 степени свободы; колеса: 2 степени свободы) |
| Материалы | Фанера и алюминий |
| Стоимость | 50 000 долл. США |
| Ширина | 64 см |
