



")
")
")



")
")














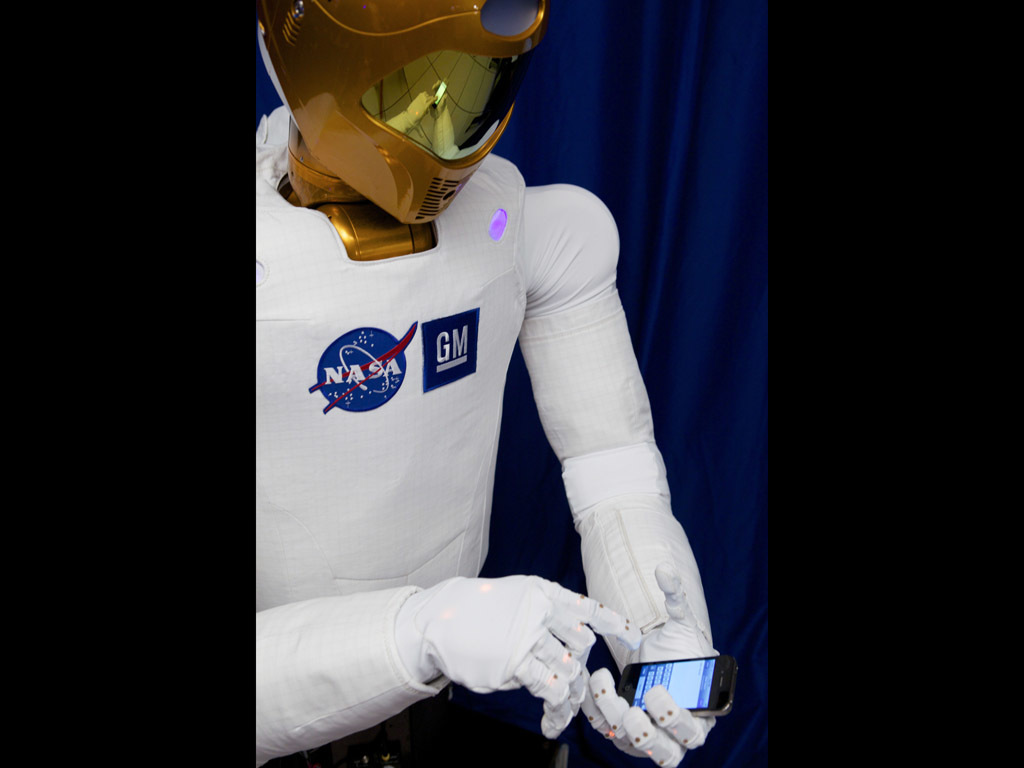















Робот Robonaut 2
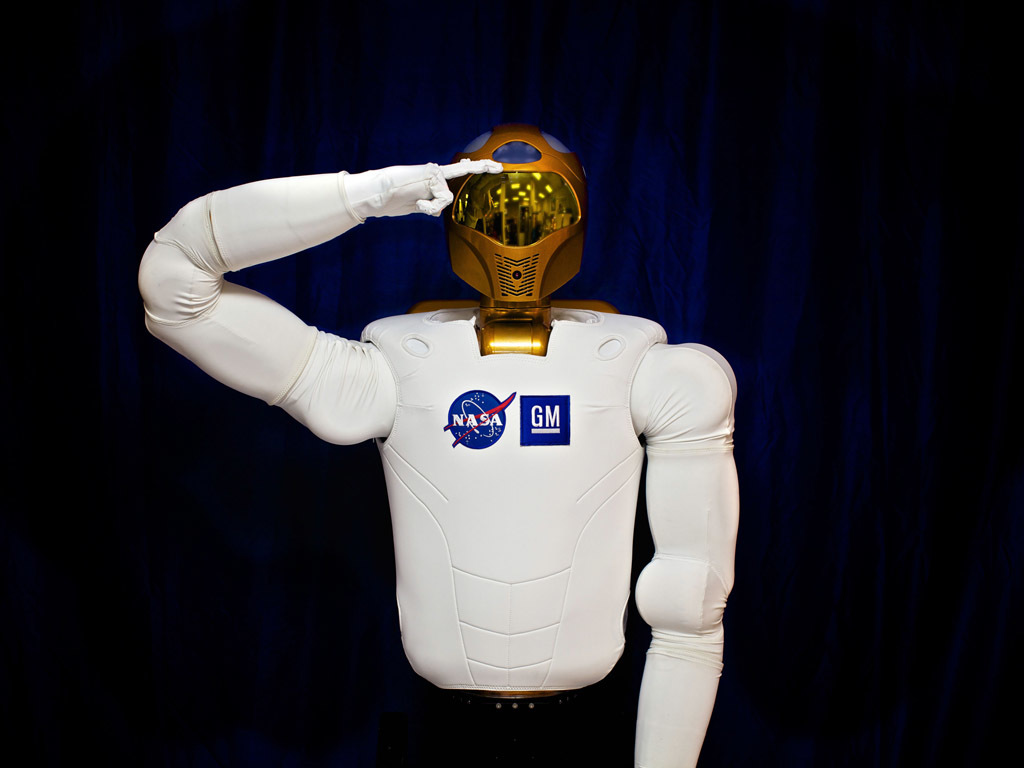
Робонавт 2 - это гуманоид, отправленный на Международную космическую станцию, чтобы помогать космонавтам с различными задачами. Он может захватывать предметы, переключать переключатели и давать пять членам экипажа после успешного выполнения заданий.
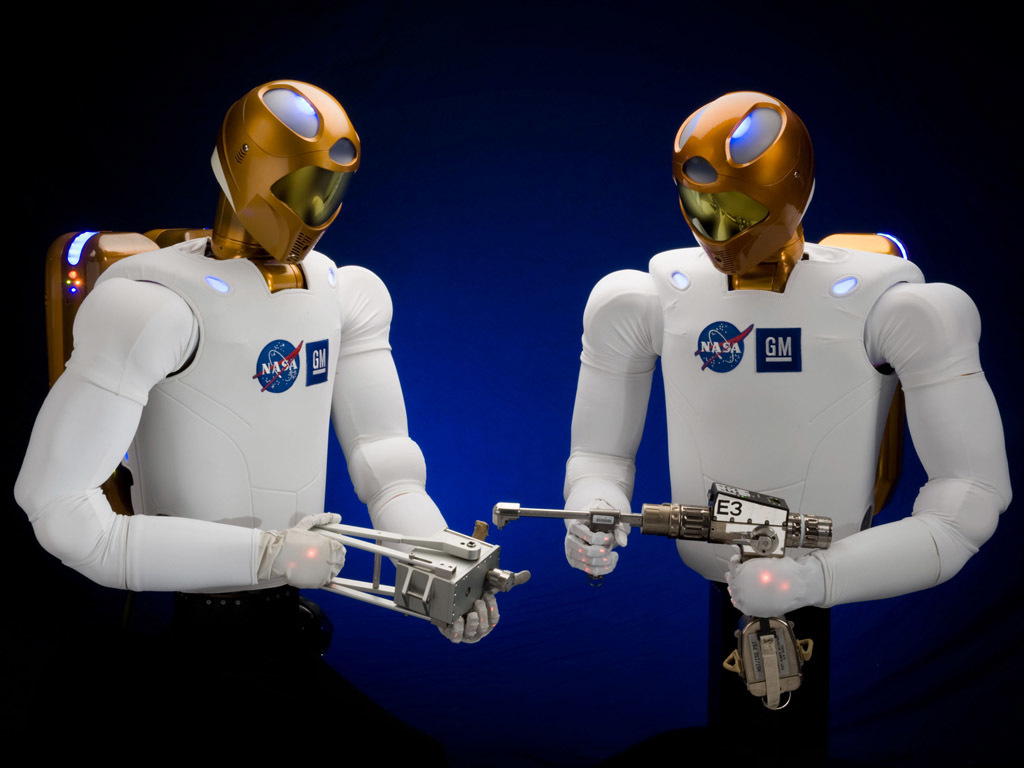
Ловкое манипулирование человеческими инструментами. Может поднимать 9 кг (20 фунтов). Оборудован автономным и дистанционным режимами работы (с МКС или Земли).Био-дизайн, сверхлегкий дизайн. Имеет автономный и дистанционный режимы работы.
Описание
- В мае 2018 года, после семи лет на орбите, Робонавт вернулся на Землю для ремонта. НАСА заявляет, что после исправления он может вернуться в космос.
- Робонавт думает своим животом: с головой, полной датчиков, Робонавт имеет достаточно места только для компьютера в животе.
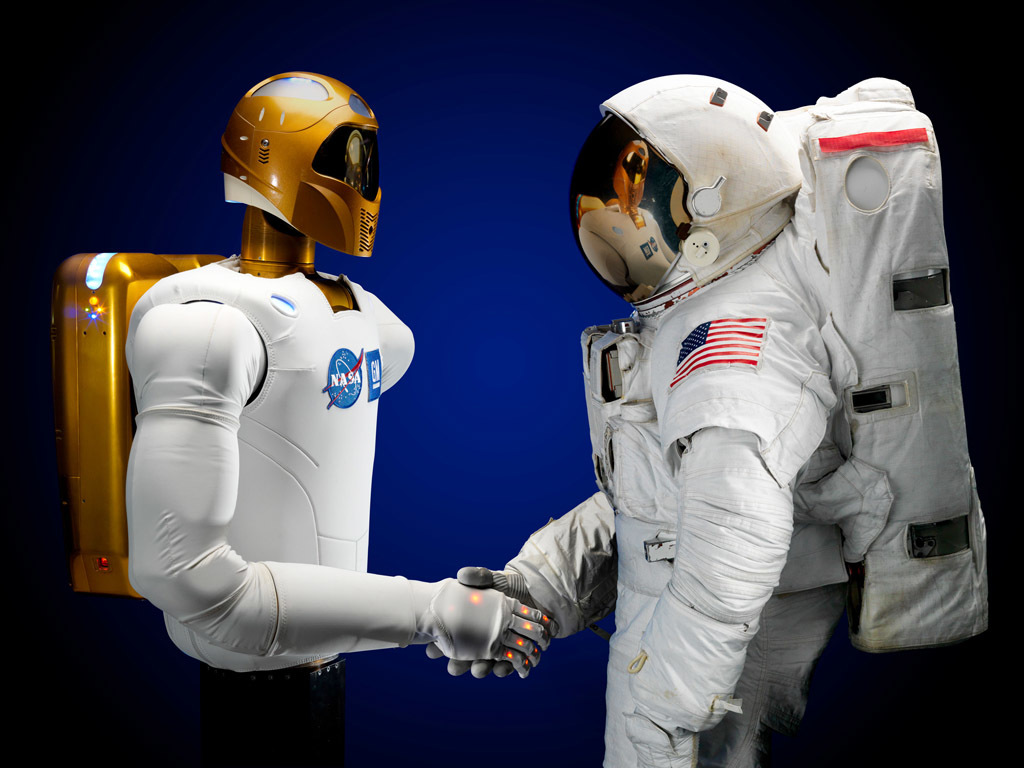
- Когда Робонавт стартовал на МКС в феврале 2011 года, он стал первым гуманоидным роботом в космосе.
- На борту МКС робот должен был работать бок о бок с космонавтами, выполняя повторяющиеся задачи, такие как измерение качества воздуха и чистка поручней.
Проект Робонавт начался в 1997 году с целью разработки робота-гуманоида, который мог бы помогать астронавтам с различными манипуляционными задачами. Результатом стал R1, прототип робота, который мог выполнять работы по техническому обслуживанию или устанавливаться на набор колес. В 2007 году Космический центр имени Джонсона НАСА и General Motors объединились для разработки Робонавта следующего поколения. R2 был представлен в 2010 году, и руководители миссии НАСА были настолько впечатлены, что решили освободить место для миссии шаттла и отправить робота на Международную космическую станцию. R2 был доставлен на МКС на борту космического корабля Дискавери в феврале 2011 года. Его основная задача на данный момент - продемонстрировать инженерам, как такие ловкие роботы ведут себя в космосе, хотя есть надежда, что с помощью обновлений Робонаут в конечном итоге возьмет на себя задачи, слишком опасные или повторяющиеся. для космонавтов,
Видео
Характеристики
| Тип робота | Аэрокосмическая промышленность, Гуманоиды |
| Бренд | NASA Johnson Space Center and GM |
| Страна производитель | США |
| Мощность | Система преобразования энергии размещена внутри рюкзака для работы на привязи. Рюкзак с батареями для автономной работы. |
| Год разработки | 2010 |
| Высота | 101,6 см |
| Масса | 149,7 кг |
| Датчики | Более 350 датчиков, включая специальные шестиосевые датчики нагрузки в руках, четыре камеры за козырьком (две для стереозрения и две вспомогательные) и инфракрасную камеру в области рта для восприятия глубины. |
| Приводы | 54 серводвигателя |
| Вычисление | 38 процессоров PowerPC |
| Степени свободы (DOF) | 42 (рука: 7 степеней свободы x 2; рука: 12 степеней свободы x 2; шея: 3 степени свободы; талия: 1 глубина резкости) |
| Материалы | В первую очередь алюминий со сталью. |
| Стоимость | 2,5 миллиона долларов |
| Ширина | 78,74 см |
