



")
")
")



")
")












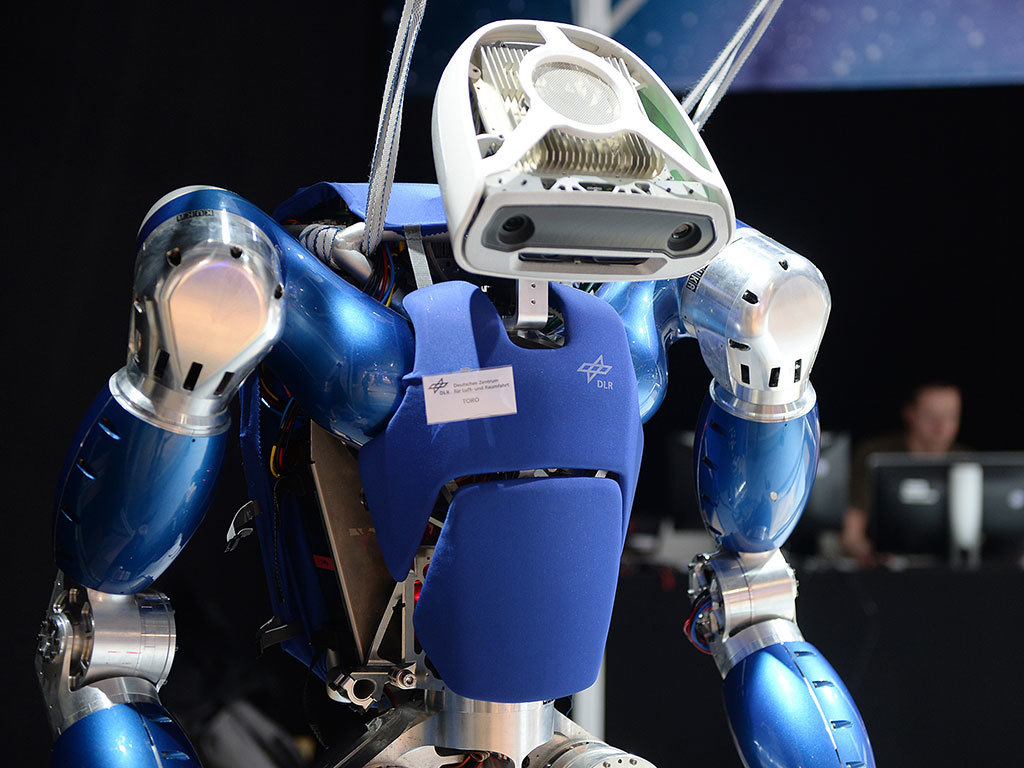
Робот TORO











Робот TORO
Торо - это продвинутый робот-гуманоид, используемый в качестве исследовательской платформы для изучения двуногой ходьбы и автономного поведения, сочетающего манипуляции и передвижение.
- TORO - это робот-робот с управлением от TOrque. Это также означает «бык» на испанском языке.
- Роботом можно дистанционно управлять с помощью контроллера Xbox.
- Ноги Toro относительно малы, что позволяет ему стоять на небольших поверхностях, но затрудняет управление роботом.
- Автономный, с режимами управления положением и крутящим моментом. Полезная нагрузка 10 кг. На основе приводов манипуляторов легкого робота (LWR) KUKA-DLR.
Видео
Характеристики
| Тип робота | Гуманоиды, Исследования |
| Бренд | German Aerospace Center (DLR) |
| Страна производитель | Германия |
| Мощность | Два блока литий-ионно-марганцево-оксидных батарей 48 В, 6,6 Ач, 1 час работы |
| Программное обеспечение | Linux реального времени на основе ядра 4. Связи и узлы промежуточного программного обеспечения с возможностью работы в реальном времени (разработано в DLR). Фреймворк аппаратной абстракции, настраиваемый во время выполнения, Robotkernel (разработан в DLR). |
| Год разработки | 2013 |
| Высота | 174 см |
| Масса | 76 кг |
| Скорость | 1,8 км/ч |
| Датчики | Датчики положения и крутящего момента в каждом шарнире. Датчик силы / крутящего момента с 6 степенями свободы на каждой лодыжке. Инерционные единицы измерения на туловище и голове. ASUS Xtion pro в голове. Две монохромные камеры FLIR / Point Grey Firefly в голове. Один Intel RealSense SR 300 в голове. |
| Приводы | 25 моторных приводов (на основе технологии LWR) на руках, ногах и бедрах. Два серводвигателя Dynamixel на шее. |
| Вычисление | Два компьютера Intel Core i7 на торсе, один компьютер Intel Core i3 в голове |
| Степени свободы (DOF) | 39 (шея: 2 глубины резкости; руки: 6 степеней свободы x 2; ноги: 6 степеней свободы x 2; бедра: 1 глубина резкости; руки: 6 степеней свободы x 2) |
| Материалы | В основном детали на заказ, фрезерованные из алюминия. |
Нашли дешевле?
