



")
")
")



")
")














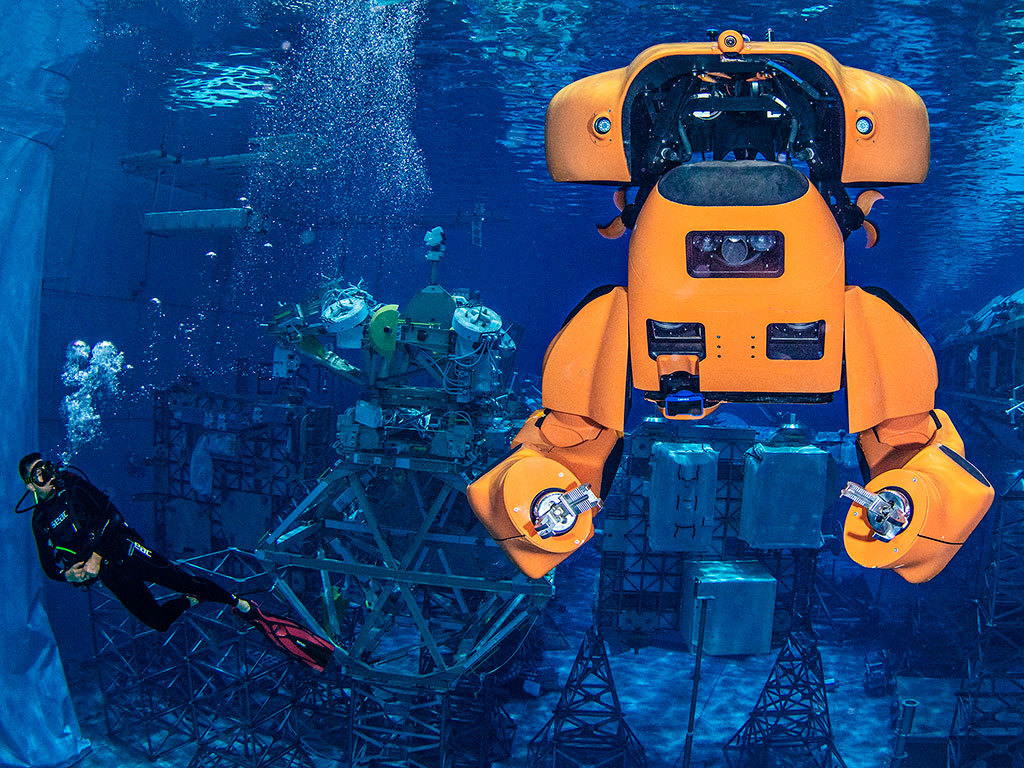










Робот Houston Mechatronics Aquanaut
Aquanaut - это беспилотный подводный аппарат, который может трансформироваться из маневренной подводной лодки, предназначенной для дальних путешествий, в полугуманоидного робота, способного выполнять сложные манипуляционные задачи. Он может проверять подводную нефтегазовую инфраструктуру, управлять клапанами и использовать инструменты.
Полностью электрический автомобиль, высокая автономность. Работает полностью без привязки и не требует вспомогательных кораблей, как с традиционными ROV. Текущая версия может преодолевать более 200 километров в подводном режиме и имеет максимальную рабочую глубину 300 метров.
Описание
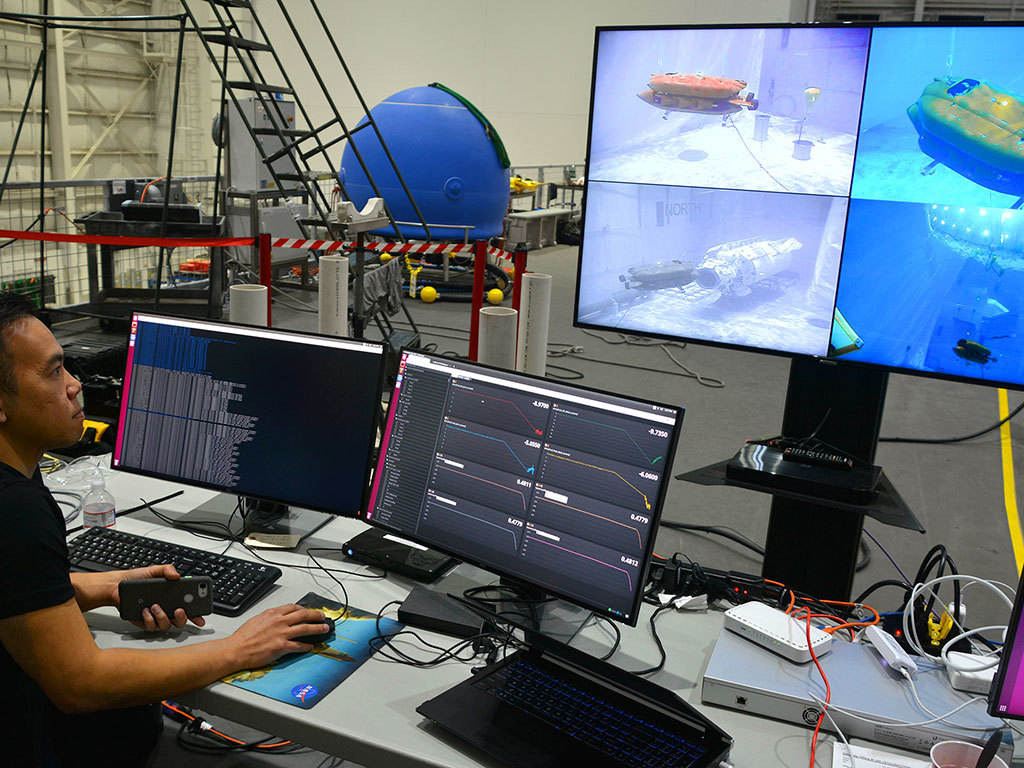
- Компания Houston Mechatronics провела испытания Aquanaut в огромном закрытом бассейне, который НАСА использует для обучения астронавтов работе в условиях невесомости.
- В том, что может быть сценой из «Трансформеров», верхняя половина робота поднимается вверх, обнажая две массивные руки и голову, которая вращается на месте. Гладкая субмарина теперь гуманоид.
- Инженеры из Houston Mechatronics часто шутят, что создание трансформатора было одной из их долгосрочных карьерных целей.
- Более двух десятков сотрудников Houston Mechatronics раньше работали в НАСА.
Хьюстонская мехатроника была основана бывшими робототехниками НАСА, которые работали над передовыми технологиями, используемыми в сложных космических миссиях. Основатели Мэтт Ондлер, Рег Берка и Ник Рэдфорд хотят применить свои знания в области робототехники в таких отраслях, как энергетика, шельфовая нефть и газ, оборона и разработка месторождений морского дна. С момента запуска HMI в 2014 году они привлекли более 23 миллионов долларов США в виде венчурного капитала. Компания, базирующаяся в Хьюстоне, штат Техас, разрабатывает полностью электрический подводный трансформируемый автомобиль под названием Aquanaut.. Он сочетает в себе возможности как подводного автономного транспортного средства, или AUV, так и дистанционно управляемого подводного транспортного средства, или ROV. В режиме AUV он может преодолевать большие расстояния до 200 км (108 морских миль) за одну миссию, составляя карту своего окружения и выполняя проверки конструкции. В режиме ROV робот может поворачивать клапаны, использовать подводные инструменты и выполнять другие манипуляции.
Видео
Характеристики
| Тип робота | Подводный, Промышленный |
| Бренд | Houston Mechatronics Inc. |
| Страна производитель | США |
| Мощность | Перезаряжаемый литий-ионный |
| Программное обеспечение | Специальное программное обеспечение, созданное на основе ROS framework |
| Год разработки | 2019 г. |
| Высота | 97 см (закрыто), 160 см (открытый) |
| Длина | 350 см |
| Масса | 1050 кг |
| Скорость | 13 км/ч (7 узлов) |
| Датчики | Манипуляторы с совместным абсолютным положением и измерением силы и крутящего момента на рабочем органе. Кузов автомобиля содержит инерциальную навигационную систему, доплеровские журналы скорости (DVL), сверхкороткую базовую линию, камеры машинного зрения, гидролокатор дальнего обзора, сканирующие гидролокаторы, GPS и пользовательский трехмерный структурированный свет. |
| Приводы | Электрический |
| Вычисление | Пакет пользовательского контроля и вычислений |
| Степени свободы (DOF) | 26 (рука: 7 степеней свободы x 2; рабочий орган руки: 1 глубина резкости x 2; движущая сила: 7 степеней свободы; голова: 2 степени свободы; механизм трансформации: 1 глубина резкости) |
| Материалы | Синтаксическая пена с композитным покрытием |
