



")
")
")



")
")












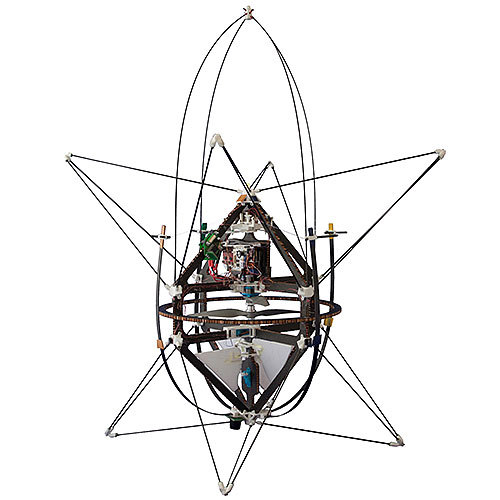











Дрон AirBurr
AirBurr - это летающий робот, предназначенный для ограниченных, загроможденных пространств. Пружинная клетка защищает его от повреждений. Даже после того, как он врезался в стены и другие предметы, он просто поднимается и взлетает.
Оснащен выдвижными рычагами для самовосстановления после столкновений. Может перемещаться, натыкаясь на окружающую среду или следуя за источником света.
Описание
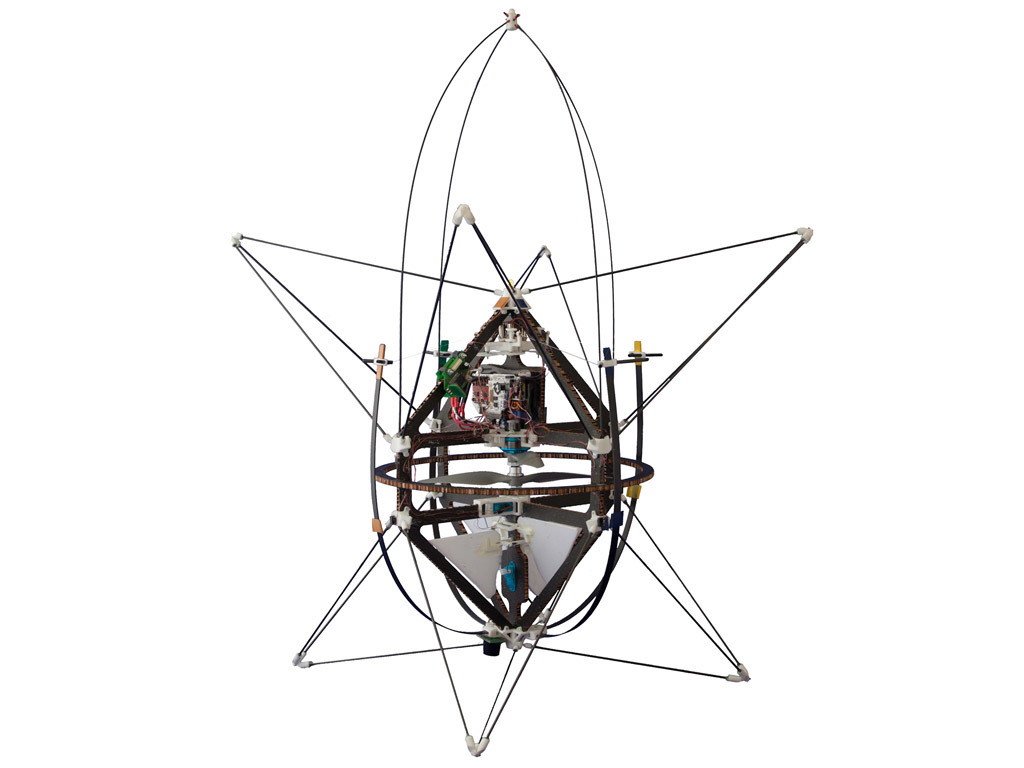
- Исследователи создали около десятка версий AirBurr с такими названиями, как V1-Hovermouse, V4-Crashy и V6-Sticky.
- AirBurr может использовать свои выдвижные ножки, чтобы вставать из любого положения, в котором он приземлится или упадет.
Проект AirBurr родился, когда исследователи из Лаборатории интеллектуальных систем Федеральной политехнической школы Лозанны (EPFL) начали наблюдать, как летают животные. Птицы и насекомые часто сталкиваются с окнами и другими препятствиями, но они созданы, чтобы выжить и восстановиться после таких сбоев, в отличие от большинства существующих летающих роботов. Первый AirBurr был 25-граммовой платформой с крылом, и с тех пор он прошел более 10 основных модификаций, увеличившись на порядок в весе! В своем развитии AirBurr смог разбиться, вставать, прилипать к стенам, следовать за источниками света и, что, возможно, наиболее важно, в целом развлекать своих создателей. Конечная цель - создать версию, способную перемещаться в еще более сложных и ограниченных средах, таких как пещеры или разрушенные здания.
Видео
Характеристики
| Тип робота | Аэрокосмическая промышленность, Исследования, Дроны |
| Бренд | Ecole Polytechnique Federale de Lausanne |
| Страна производитель | Швейцария |
| Мощность | Литий-полимерный аккумулятор на 1350 мАч, 10 минут полета. |
| Программное обеспечение | Специальное программное обеспечение, написанное на языке C для встроенных микроконтроллеров. |
| Год разработки | 2010 |
| Высота | 70 см |
| Длина | 35 см |
| Масса | 0,35 кг |
| Датчики | Стандарт: трехосный акселерометр и гироскоп (для инерционной стабилизации), ультразвуковой датчик (определение высоты), четыре фотодиода (для определения положения ног и внешних источников света). Дополнительно: трехосный акселерометр с большим ускорением (обнаружение силы столкновения), миниатюрные оптические датчики потока (антидрейф), контактный датчик на основе эффекта Холла, встроенный в защитный кожух. |
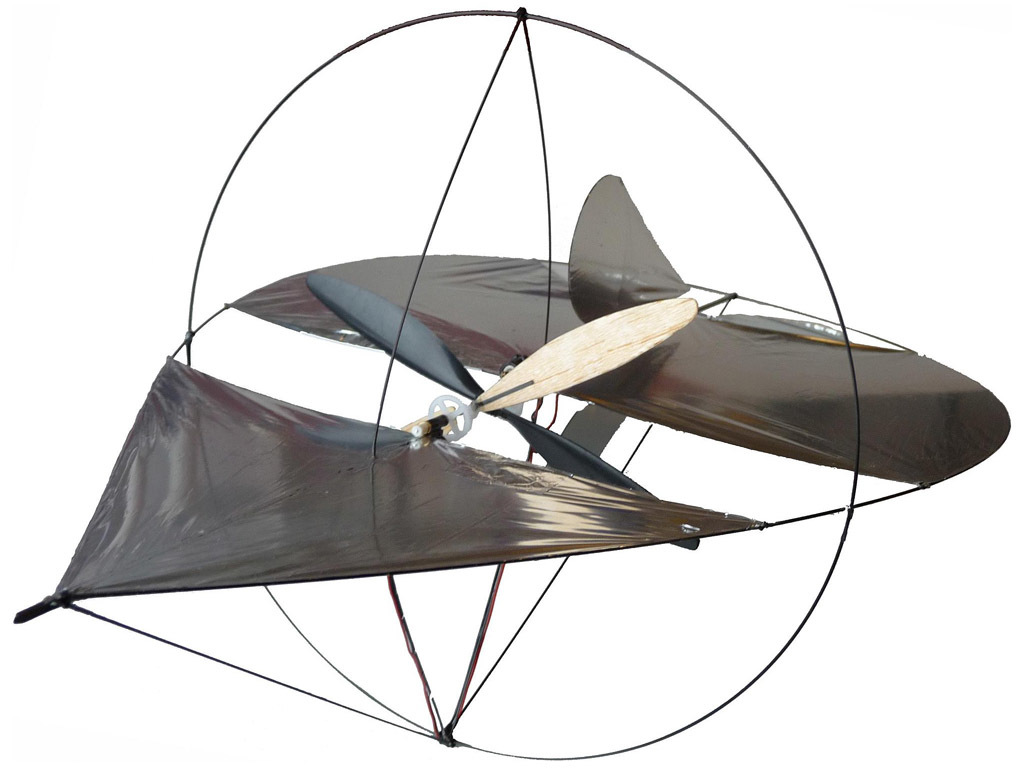
| Приводы | Коаксиальный двойной бесщеточный двигатель постоянного тока (тяга), два сервопривода (управляющие поверхности) и четыре щеточных двигателя постоянного тока с индивидуальной коробкой передач (ножки). |
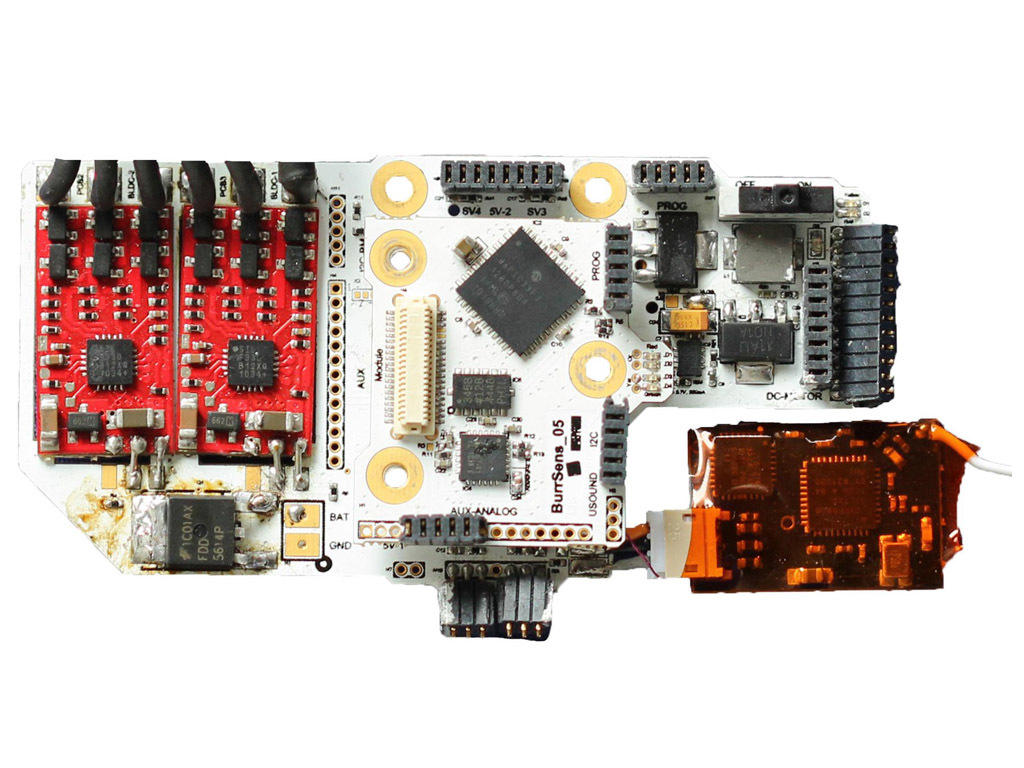
| Вычисление | Два 16-битных микроконтроллера. Настраиваемая беспроводная связь для телеметрии и регистрации данных. |
| Материалы | Внутренний каркас из углеродного волокна и арамида; стержни из углеродного волокна и спеченный лазером пластик для защитной структуры. |
| Ширина | 35 см |
