



")
")
")



")
")












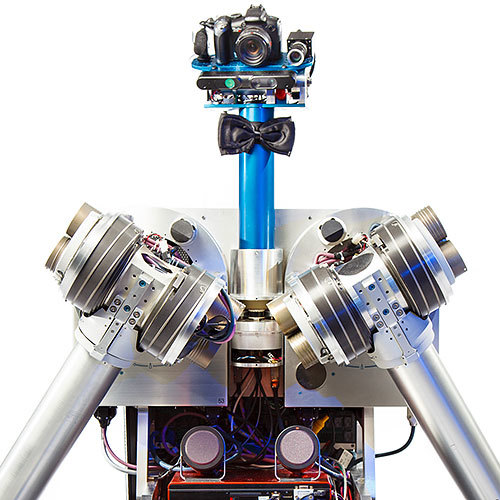
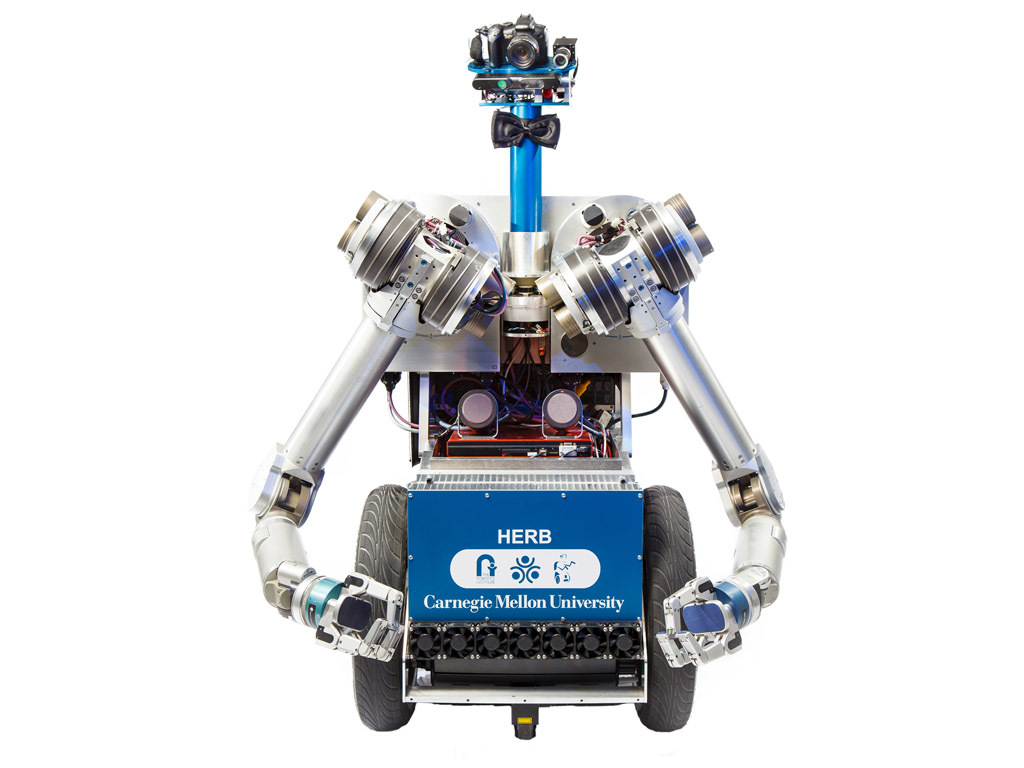










Робот Herb
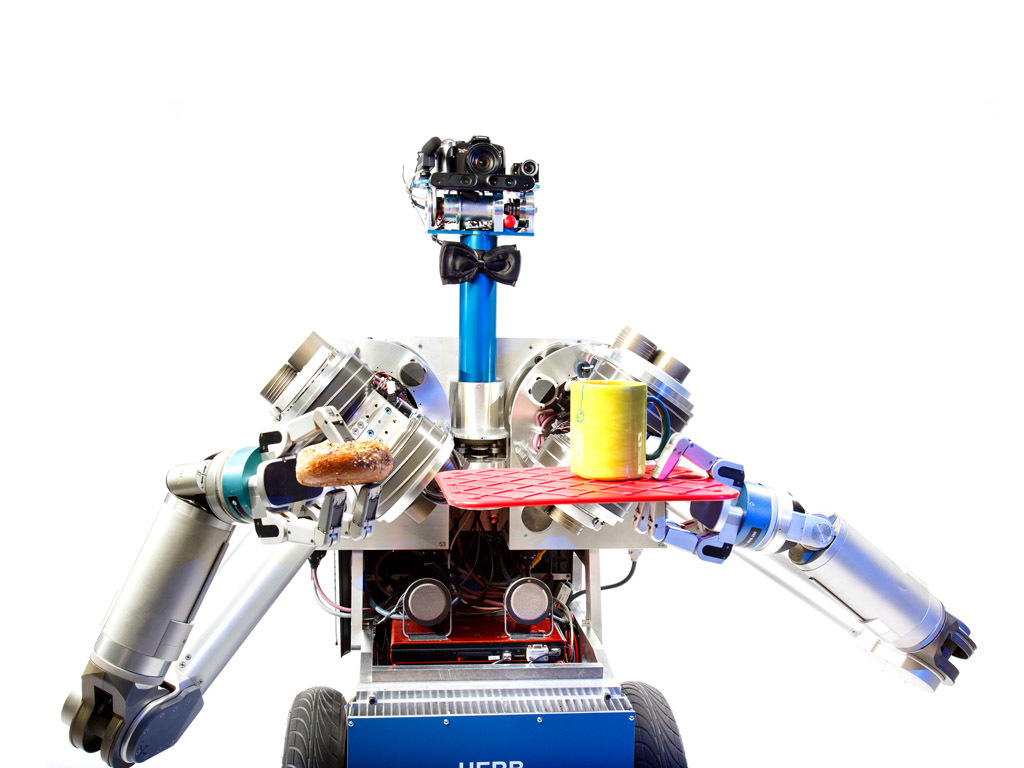
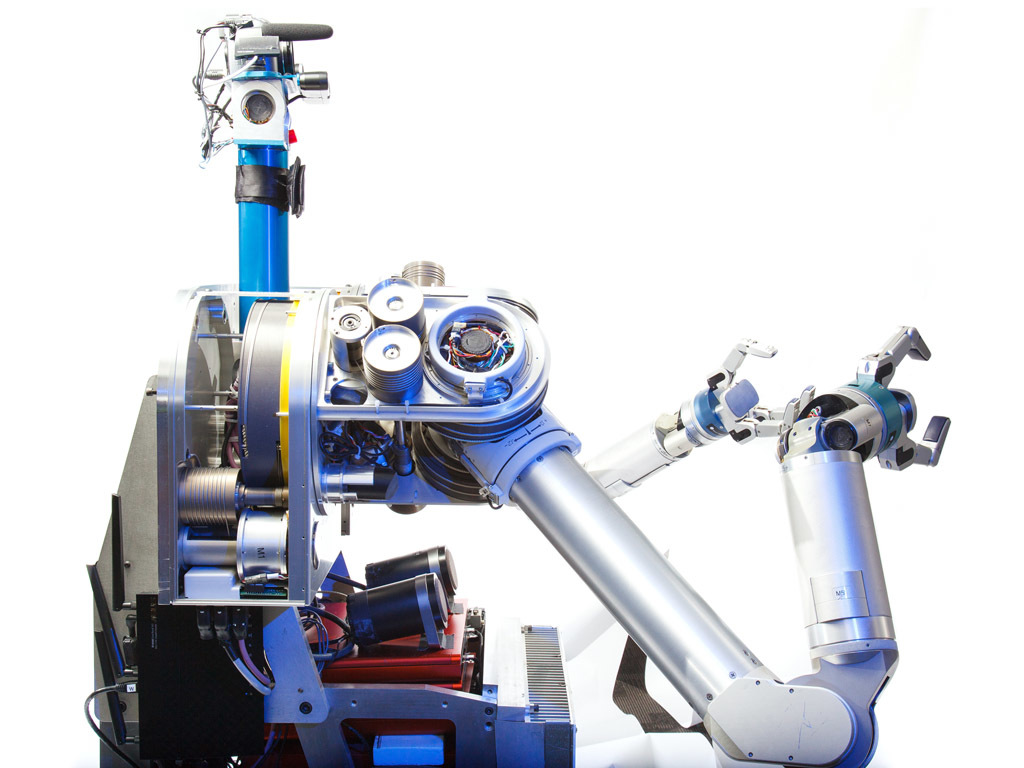
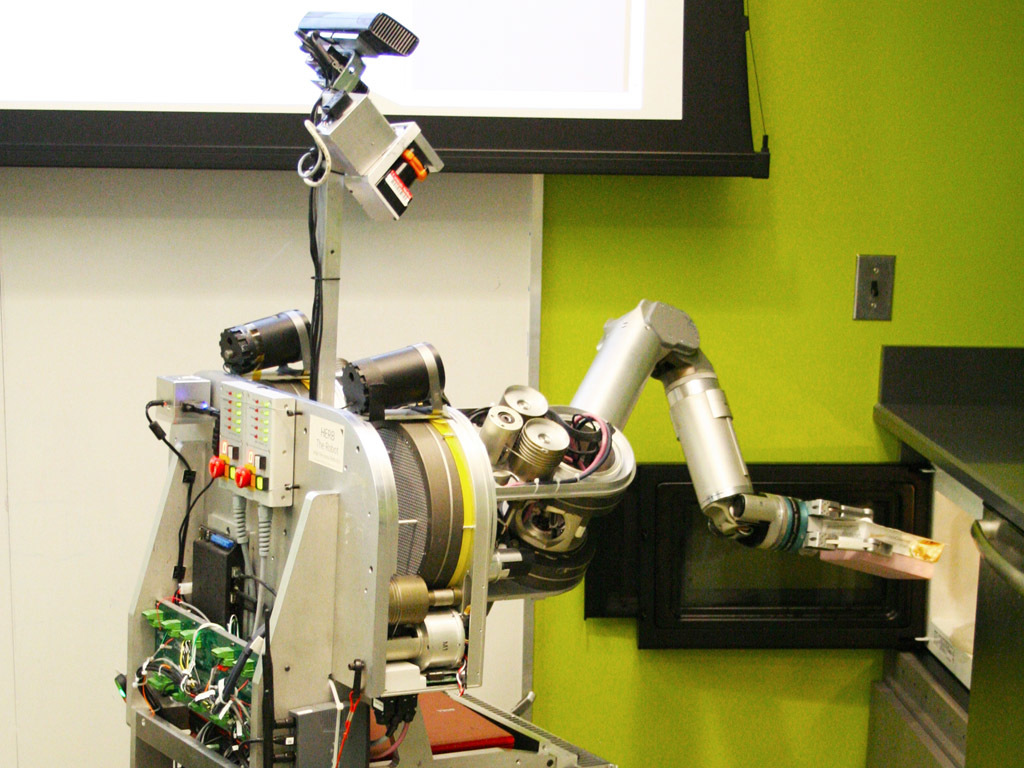
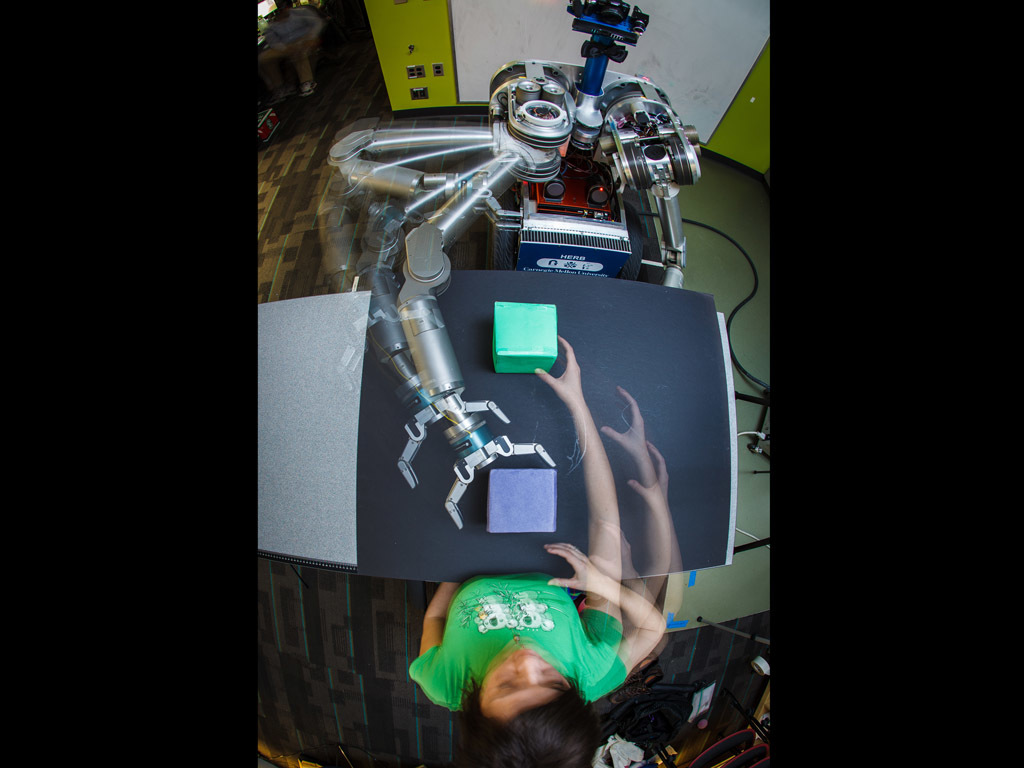
Херб - автономный робот с мобильной базой и двумя руками. Он учится выполнять задачи в среде людей, в том числе на кухне, где ему нравится разделять печенье и сливки из своих Oreos.
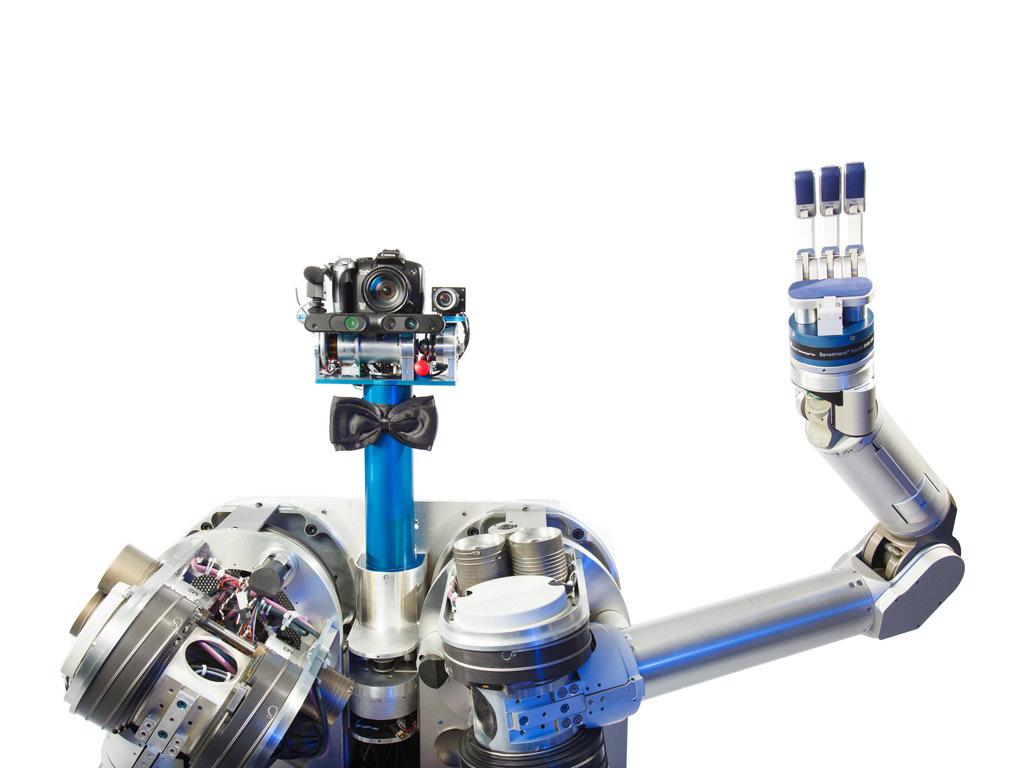
Способен распознавать объекты и планировать безопасные плавные движения для совместных манипуляций.
Описание
- Херб означает «робот-дворецкий, исследующий дом», но это имя также является данью уважения Герберту А. Саймону, пионеру искусственного интеллекта и известному профессору CMU.
- Херб любит выполнять манипуляции на кухне и очень полюбил тропический пунш Fuze, пирожные и ужины, приготовленные в микроволновой печи.
- Херб умеет танцевать макарену.
Herb был создан командой под руководством Сиддхартхи Шринивасы, ныне профессора Карнеги-Меллона, в 2006 году. Первоначальное финансирование поступило от Intel и Центра технологий качества жизни, научно-исследовательского центра Национального научного фонда, ориентированного на создание интеллектуальных систем, которые работают в симбиозе с люди в повседневных задачах. Первая версия, получившая название Busboy, состояла из блуждающей мобильной базы Segway RMP 200 и одной руки Barrett WAM, установленной на пьедестале. В 2008 году группа создала следующую версию, Herb 1.0, внося улучшения в манипулятор. В 2010 году исследователи полностью переработали робота с нуля, создав Herb 2.0 с двумя руками и головой, специальной электроникой, охлаждением и питанием, чтобы работать без привязки до шести часов.
Видео
Характеристики
| Тип робота | Исследования, Гуманоиды |
| Бренд | University of Washington |
| Страна производитель | США |
| Мощность | Две литий-ионные батареи 56 В 20 Ач для рук, компьютеров и датчиков; дополнительные литий-ионные аккумуляторы на базе Segway. |
| Программное обеспечение | ОС Linux и специальное программное обеспечение управления с интеграцией ROS (Robot Operating System). |
| Год разработки | 2006 |
| Высота | 140 см |
| Длина | 62 см |
| Масса | 127 кг |
| Скорость | 5,4 км/ч |
| Датчики | Зеркальная камера, монокулярная камера высокого разрешения Gigabit-Ethernet, камера RGBD, настраиваемый вращающийся 3D-лазер, инфракрасная навигационная система, микрофон, тактильные прокладки, датчики силы-момента, тензодатчики, базовые лазеры на планарной основе. |
| Приводы | Два рычага Barrett WAM с 7 степенями свободы, основание Segway RMP 200, кастомная наклонно-поворотная головка 2D-OF. |
| Вычисление | Три встроенных мобильных рабочих станции Dell Precision M6500 с 12 ГБ оперативной памяти и твердотельными накопителями на 256 ГБ. |
| Степени свободы (DOF) | 27 (голова: 2 степени свободы; рука: 7 степеней свободы x 2; рука: 4 степени свободы x 2; основание: 3 степени свободы) |
| Материалы | Изготовленное на заказ алюминиевое шасси |
| Ширина | 65,5 см |
