



")
")
")



")
")












Робот Mercury

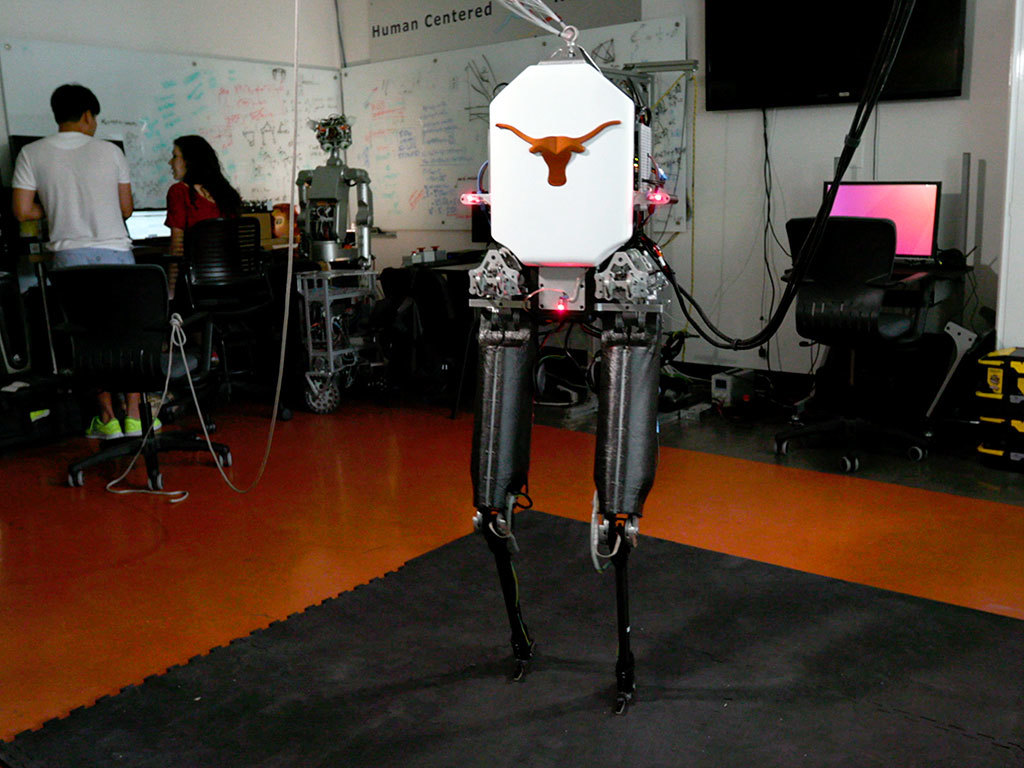






Робот Mercury
Меркурий - двуногий робот размером со взрослого человека, предназначенный для изучения высокодинамичных движений. У него пассивные лодыжки, поэтому он должен постоянно предпринимать шаги, чтобы оставаться в равновесии. Продолжай двигаться, Меркурий.
Описание
- Меркурий назван в честь римского бога путешественников, обычно изображаемого в крылатых сандалиях.
- В течение трех лет исследователь Донхён Ким разбирал и собирал Меркьюри около 100 раз.
- Неправильно цитируя Вуди из «Истории игрушек», Меркьюри не ходит, он стильно падает.
Динамически балансирует, постоянно шагая. Точное отслеживание траектории с помощью последовательных упругих приводов во всех суставах. Продвинутые инерционные системы оценки состояния и управления с обратной связью. Контроллер всего тела может одновременно выполнять высокоуровневые декартовы задачи при ходьбе и задачи манипулирования руками.
Видео
Характеристики
| Тип робота | Исследования, Гуманоиды |
| Бренд | UT Austin, Meka Robotics, and Apptronik |
| Страна производитель | США |
| Мощность | Источник питания 1 кВт 48 В постоянного тока |
| Программное обеспечение | RT-Preempt Ubuntu 16.04 (управление в реальном времени), специально созданный контроллер движения всего тела с открытым исходным кодом Dynacore |
| Год разработки | 2018 |
| Высота | 150 см |
| Длина | 20 см |
| Масса | 22 кг |
| Скорость | 4 км/ч |
| Приводы | Бесщеточные двигатели постоянного тока Moog BN23-23 и линейные упругие приводы Meka 2011. |
| Вычисление | Главный компьютер с Intel Core i5-7300U 2,6 ГГц, 4 ГБ ОЗУ |
| Степени свободы (DOF) | 6 (Нога: 3 степени свободы x 2) |
| Материалы | Торс из углеродного волокна, рычаги и накладки на ноги для жесткости. Эластичные трансмиссии алюминиевой серии. |
| Стоимость | 150 000 долл. США |
| Ширина | 30 см |
Нашли дешевле?
