



")
")
")



")
")












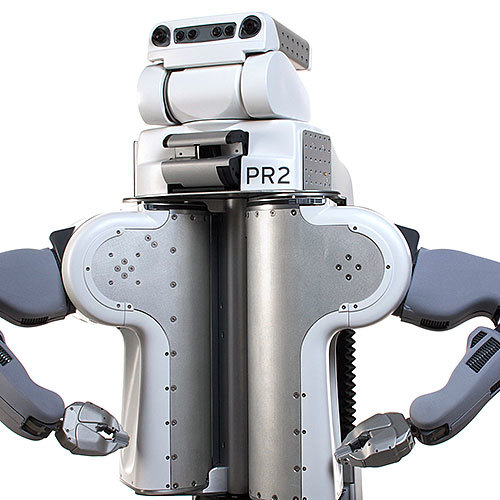

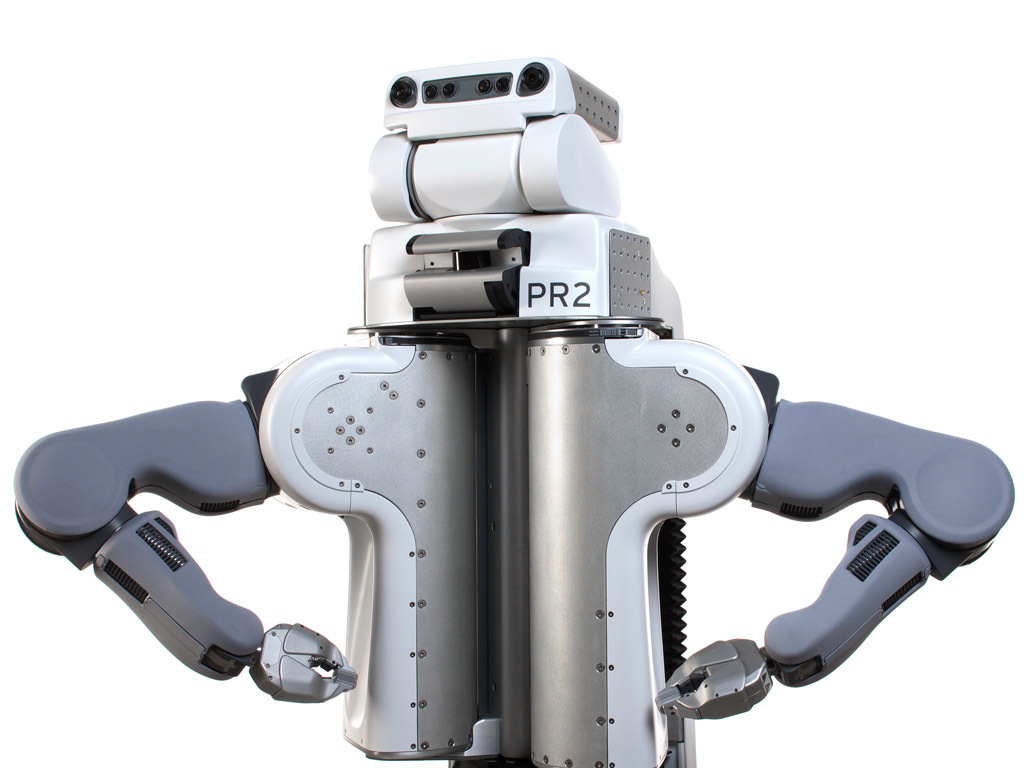


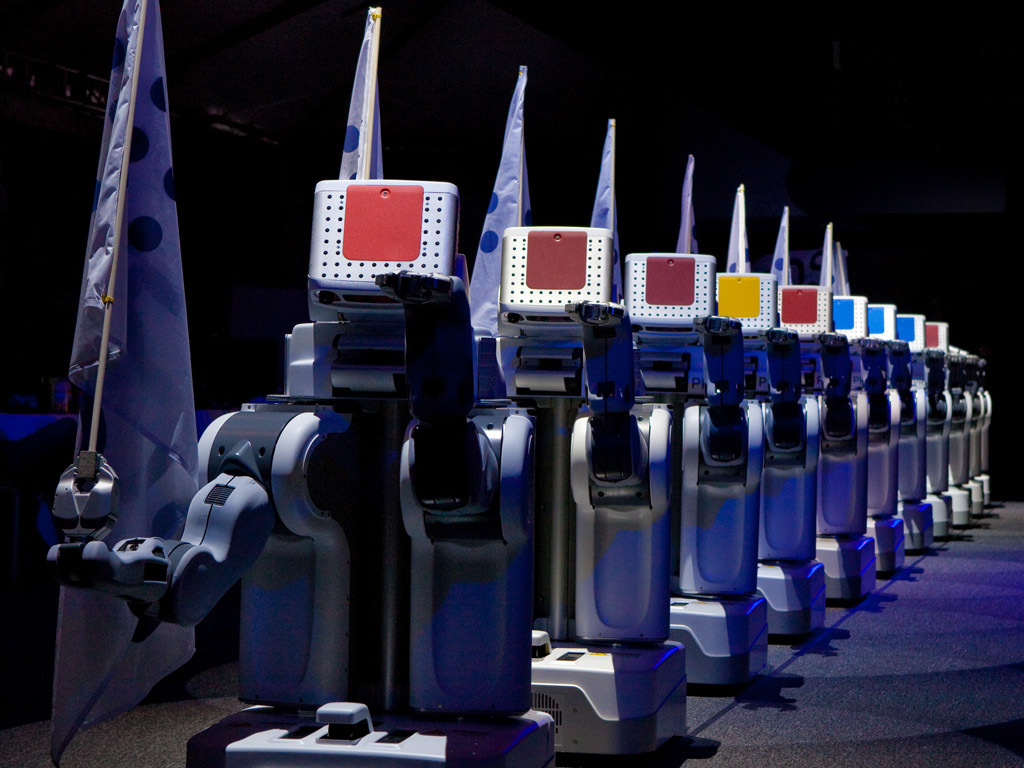













Робот PR2
PR2 - один из самых передовых исследовательских роботов, когда-либо созданных. Его мощное аппаратное и программное обеспечение позволяет ему делать такие вещи, как убирать столы, складывать полотенца и приносить вам напитки из холодильника.
Описание
Японские исследователи научили своих PR2 выезжать из лаборатории, ходить в ресторан Subway и приносить им бутерброды.
Оснащен ROS и другими открытыми программными модулями. Способен автономно перемещаться и манипулировать широким спектром объектов.
Исследователи из Пенсильванского университета разработали процедуру для своего PR2 под названием POOP SCOOP, или «Восприятие оскорбительных продуктов и сенсорное управление захватом объектов». Он подбирает все, что вы не хотите брать сами.
В настоящее время в лабораториях и университетах по всему миру имеется более 30 PR2.
Скотт Хассан, один из первых архитекторов Google, основал Willow Garage в конце 2006 года. Он задумал создать инновационную исследовательскую лабораторию, посвященную ускорению разработки приложений для робототехники. В то время два исследователя из Стэнфорда, Кинан Вайробек и Эрик Бергер, создали робота под названием PR1. Пара собирала средства на разработку ROS, или Robot Operating System, робототехнической платформы с открытым исходным кодом, а также на создание копий PR1 для распространения в исследовательских лабораториях по всему миру в качестве первой общей платформы для разработки персональной робототехники. Хасан нанял Вайробека и Бергера, чтобы они запустили и запустили программу персональной робототехники в Willow Garage. Пока Бергер руководил разработкой программного обеспечения, Вайробек разработал нового робота PR2. Willow завершила разработку первых прототипов PR2 в конце 2008 года, а в феврале 2009 года выпустила первую стабильную версию ROS. В 2010 году было объявлено о бета-программе PR2, в рамках которой одиннадцать организаций по всему миру получили PR2 бесплатно. В сентябре 2010 года PR2 стал доступен для покупки.
Видео
Характеристики
| Тип робота | Исследования, Гуманоиды |
| Бренд | Willow Garage |
| Страна производитель | США |
| Мощность | Литий-ионный аккумулятор 1,3 кВтч, 2 часа работы |
| Программное обеспечение | ROS (операционная система роботов) и другие пакеты с открытым исходным кодом, включая библиотеки машинного зрения OpenCV и библиотеки обработки облаков точек PCL 3D. |
| Год разработки | 2010 |
| Высота | 165 см |
| Длина | 66,8 см |
| Масса | 226,8 кг |
| Скорость | 3,6 км/ч |
| Приводы | 32 щеточных двигателя постоянного тока |
| Вычисление | Два четырехъядерных процессора Intel i7 Xeon, 24 ГБ памяти, внутренний жесткий диск на 500 ГБ и съемный жесткий диск на 1,5 ТБ. |
| Степени свободы (DOF) | 20 (Рука: 4 степени свободы x 2; запястье: 3 степени свободы x 2; захват: 1 глубина резкости x 2; панорамирование / наклон головы: 2 степени резкости; наклон головы лазера: 1 глубина резкости; телескопический позвоночник: 1 глубина резкости; приводы мобильной базы в комплект не входят) |
| Материалы | Твердый пластик и металл снаружи с поролоновыми крышками для рук. |
| Стоимость | 400000 долларов (однорукая версия по цене 285000 долларов). |
| Ширина | 66,8 см |
