



")
")
")



")
")
















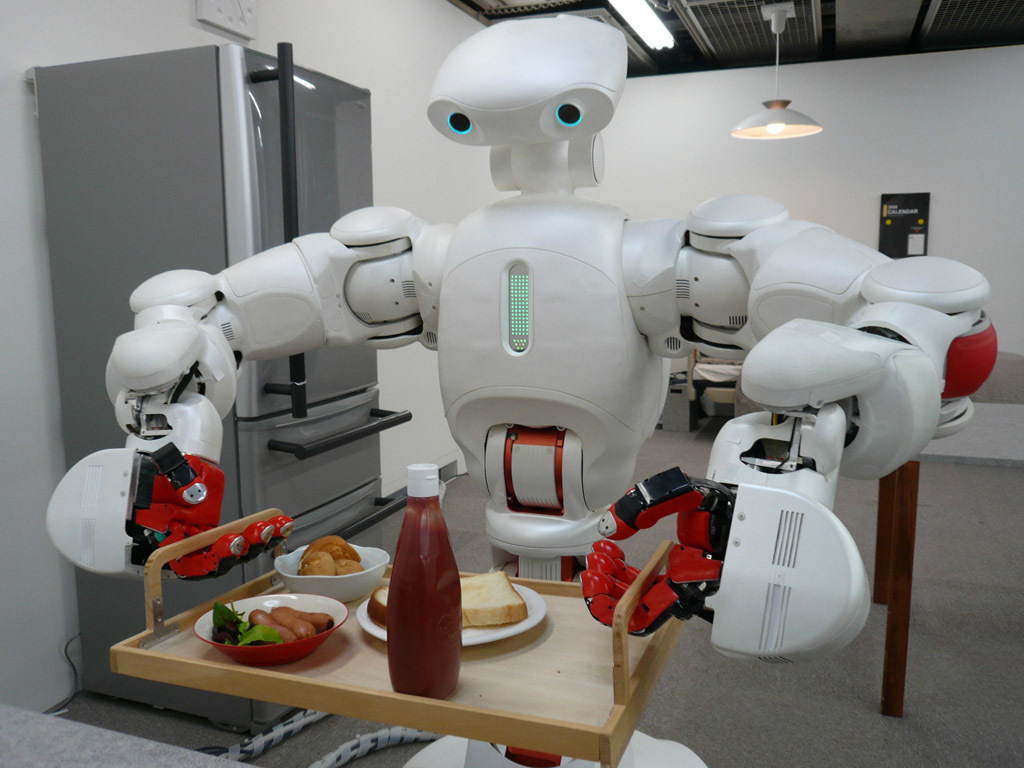








Робот Twendy One
Твенди Один - гуманоид с сильными руками, ловкими руками и мобильной базой. Он предназначен для помощи пожилым людям в их домах, помогая им передвигаться и выполняя домашние дела.
Оснащен высокопроизводительными приводами. Способен хватать предметы различной формы и помогать человеку вставать и ходить.
Описание
Предшественница Twendy One, Венди, была первым роботом, который смог успешно разбить яйцо.
Twendy One может помочь вам встать с постели, приготовить завтрак, а затем принести его вам, и все это автономно.
Робототехники Талли Фут и Мелони Уайз разработали первую версию TurtleBot, работая в Willow Garage в конце 2010 года. Они хотели создать небольшого робота, способного работать под управлением операционной системы роботов, или ROS, программной платформы для робототехники, разрабатываемой в Willow. В соответствииПо мнению Талли, цель состояла в том, чтобы «доказать, что вы можете запустить ROS на процессоре Intel Atom-scale». Первоначальный прототип TurtleBot состоял из базы iRobot Create с Microsoft Kinect, гироскопа, аккумуляторной батареи и платы питания, установленной сверху; робот также нес ноутбук Asus 1215N, работающий под управлением ROS. Идея заключалась в том, чтобы разработать базовую платформу, а затем опубликовать дизайн, чтобы другие могли построить и улучшить робота. Но после того, как Фут и Уайз обнаружили, что есть интерес к покупке робота, они переработали прототип в систему производственного уровня. В августе 2011 года Willow в сотрудничестве с двумя производителями роботов начала поставки TurtleBots. «А потом у всех были TurtleBots! Это было безумие! Внезапно мы увидели на YouTube видео о TurtleBots и опубликованных статьях», - вспоминает Уайз.. «Мы просто получили бы всевозможные крутые вещи, которые мы никогда не ожидали, что люди будут делать с TurtleBots».
Видео
Характеристики
| Тип робота | Гуманоиды, Исследования |
| Бренд | Waseda University |
| Страна производитель | Япония |
| Мощность | Литий-ионный аккумулятор, 30 минут работы |
| Программное обеспечение | ОС Linux. Заказное программное обеспечение. |
| Год разработки | 2007 |
| Высота | 146,7 см |
| Масса | 111 кг |
| Скорость | 2,7 км/ч |
| Датчики | Стереокамеры, пять шестиосевых датчиков силы, 60 датчиков положения, более 600 датчиков распределенной силы. |
| Приводы | 51 Серводвигатели переменного тока |
| Вычисление | Семь процессоров Pentium |
| Степени свободы (DOF) | 47 |
| Материалы | Силикон, пластик и металл. |
| Ширина | 73,4 см |
